Министерство образования Российской Федерации
Кафедра «Автоматизация машиностроения»
ОТЧЁТ
по лабораторной работе №1
«Изучение робота МП-11»
Выполнил:
Кутуков АГ
АМ-301
Преподаватель:
Токарев ДГ
Тольятти – 2009г
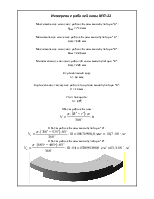
Принципиальная
схема устройства подготовки воздуха
1 – фильтр - влагоотделитель 2-12х40 ГОСТ 7437-72;
2 – маслораспылитель В44-23 МН4693-63;
3 – пневмоклапан редукционный 12-1 ГОСТ 18468-72;
4 – манометор, показывающий МТ-1 ТУ-25-82-72-75;
5 – вентиль запорный муфтовый 15К-4186Р МН4694-63;
6 – присоединительный штуцер.
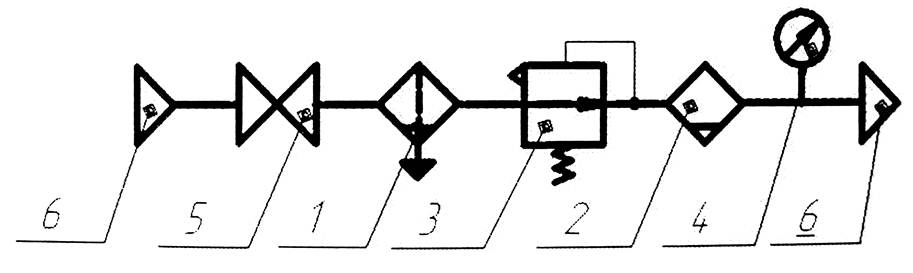
Устройство двухкаскадного редукционного пневмоклапана
|
1 – усилитель сопло – заслонка; |
2 – междроссельная камера; |
|
3 – промежуточная камера; |
4 – мембрана; |
|
5 – сопротивление сопло – заслонка; |
6 – пружина задатчика; |
|
7 – регулировочный винт; |
8 – камера питания; |
|
9 – подпружиненный клапан; |
10 – мембрана; |
|
11 – выходная камера; |
Принципиальная схема промышленного работа МП-11
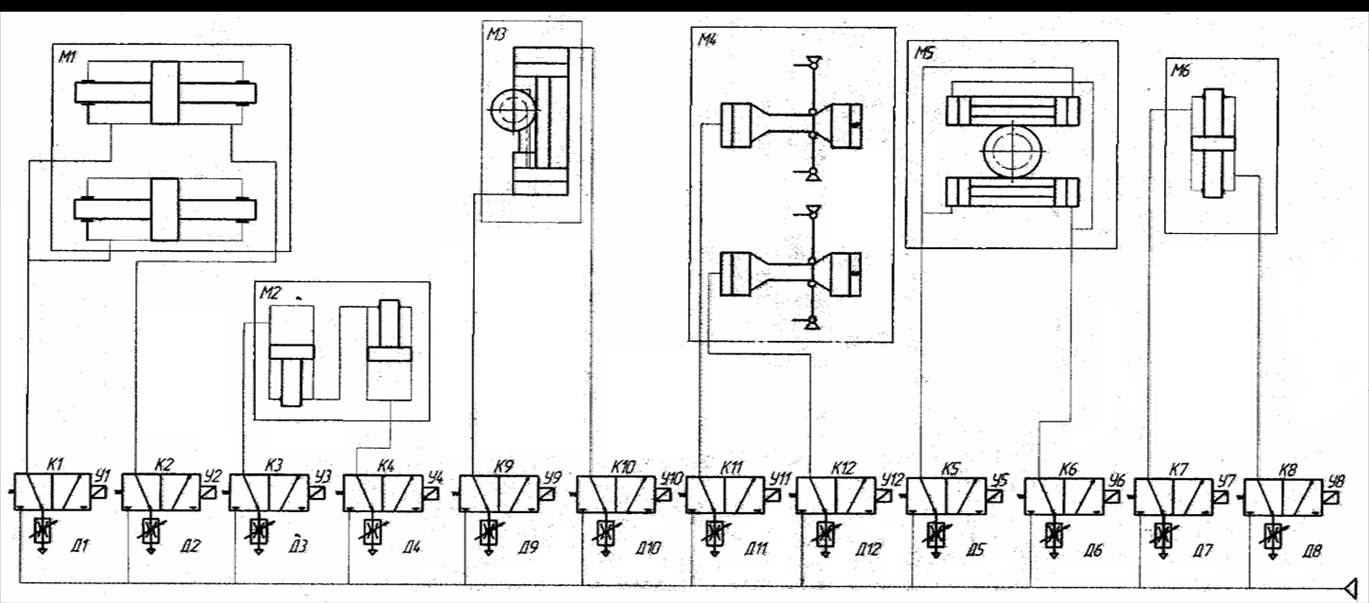
М1-модуль горизонтального перемещения рук;
М2-модуль сдвига захвата;
М3-модуль ротации захвата;
М4-модуль захвата;
М5-модуль поворота;
М6-модуль подъема;
К1…К12- клапаны распределители;
У1…У12-электромагниты;
Д1…Д12-регулируемые дроссели.
Устройство основных механизмов манипулятора
Механизм подъёма предназначен для обеспечения подъёма и опускания рук манипулятора. Механизм подъёма состоит из корпуса (цилиндра) 1 и штока (поршня) 2, уплотненного манжетами.
На нижнем конце штока имеются проточка и выступ, предназначенные для установки и фиксации механизма поворота, а на верхнем конце установлен кронштейн 3 для крепления амортизатора поворота.
Для улучшения динамики работы на подъём и опускание штоковые полости выполнены разных сечений.
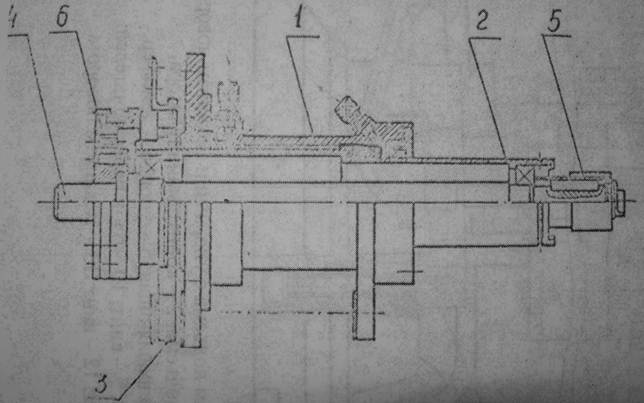
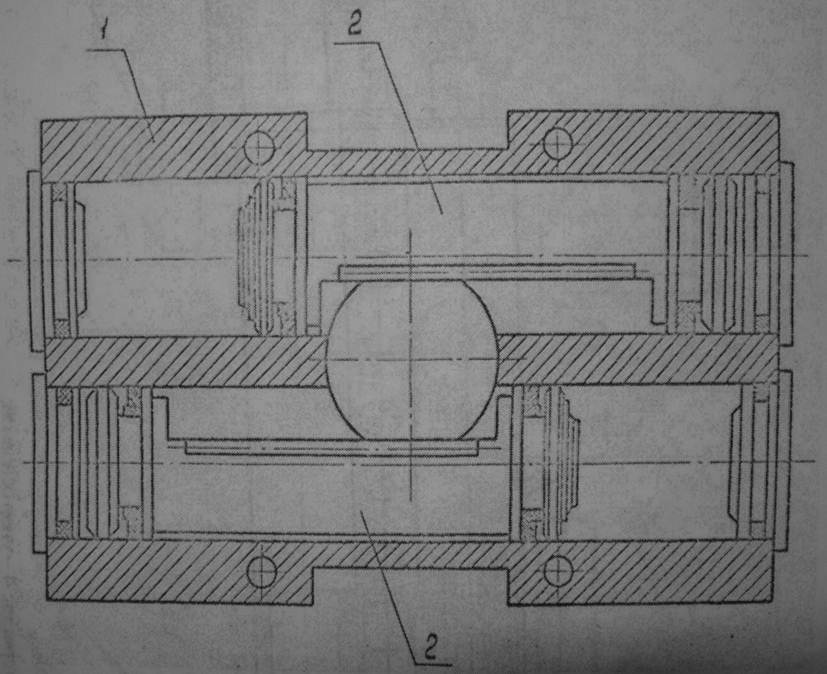
Механизм поворота предназначен для обеспечения поворота рук манипулятора. Механизм поворота состоит из корпуса 1, в котором установлены две шток-рейки 2.
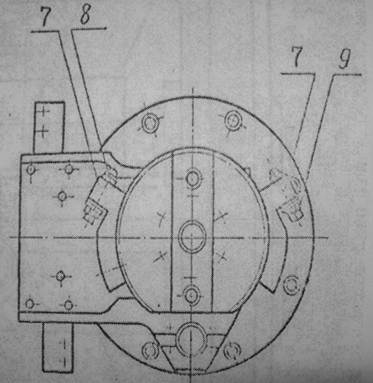
Регулировка механизма поворота производится в два этапа и сводится к установке упорами 7 (грубая настройка) и микровинтами 8 (точная настройка) (см.рис.1) необходимого угла поворота рук в горизонтальной плоскости
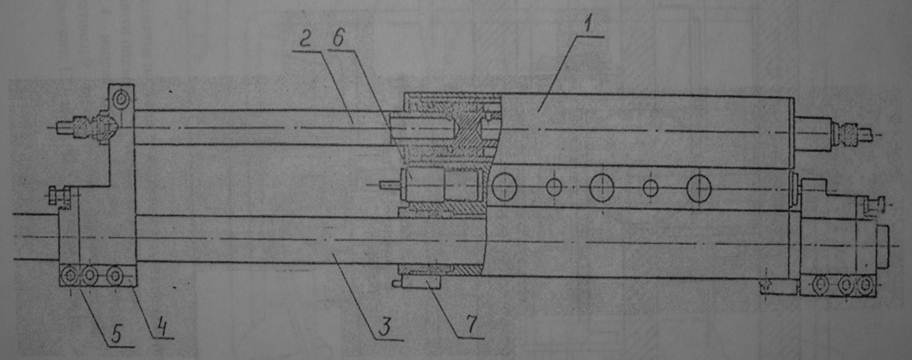
Рука (рис.4) предназначена для обеспечения выдвижения схвата в рабочую зону и состоит из корпуса 1, шток-поршня 2, стержня 3, основных упоров 4 и регулировочных упоров 5.
Схваты и узлы перемещения схвата устанавливаются в стержень 3.
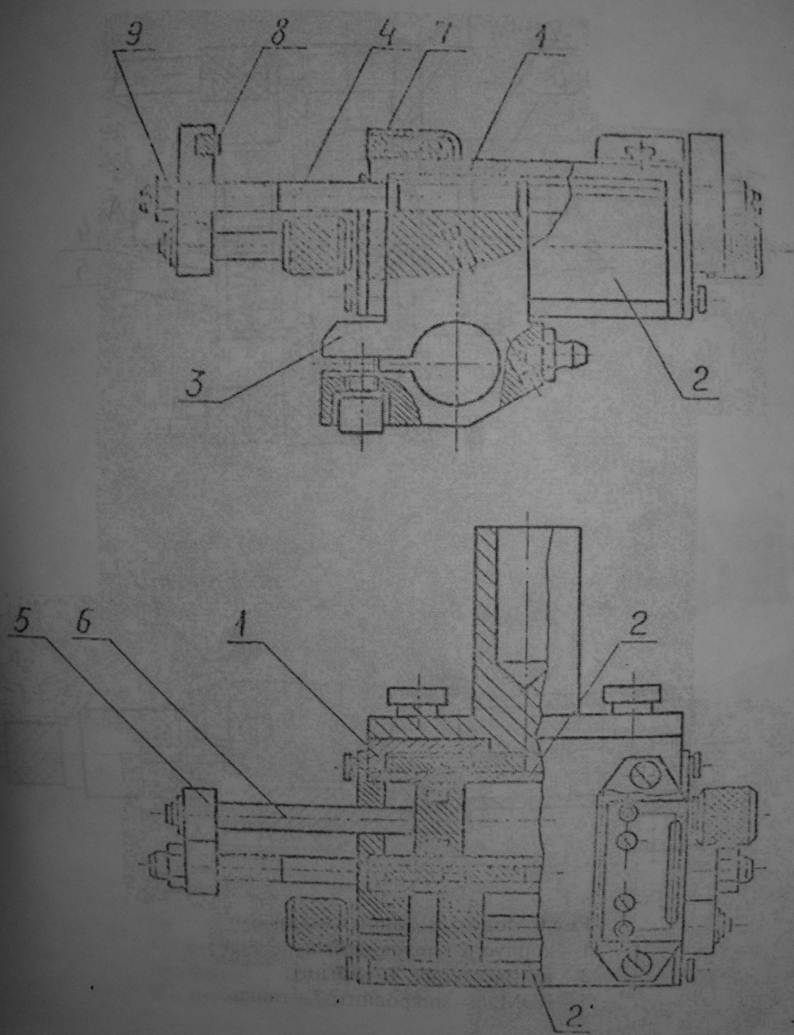
Механизм сдвига схвата (рис.5) предназначен для обеспечения перемещения схвата и состоит из корпуса 1 с двумя цилиндрами 2, каретки 3, соединенной штоком 4 через упор 5 со штоком 6. На корпусе 1 установлены КЭМы, а соответствующие им магниты 8 установлены на упорах 5.
Схват устанавливается в зажим каретки 3, которая перемещается по наружным поверхностям цилиндров 2.
При подаче воздуха в одну полость шток 6 перемещает каретку 3 с другим штоком до упора. Аналогично происходит обратное движение каретки при подаче воздуха в другую полость.
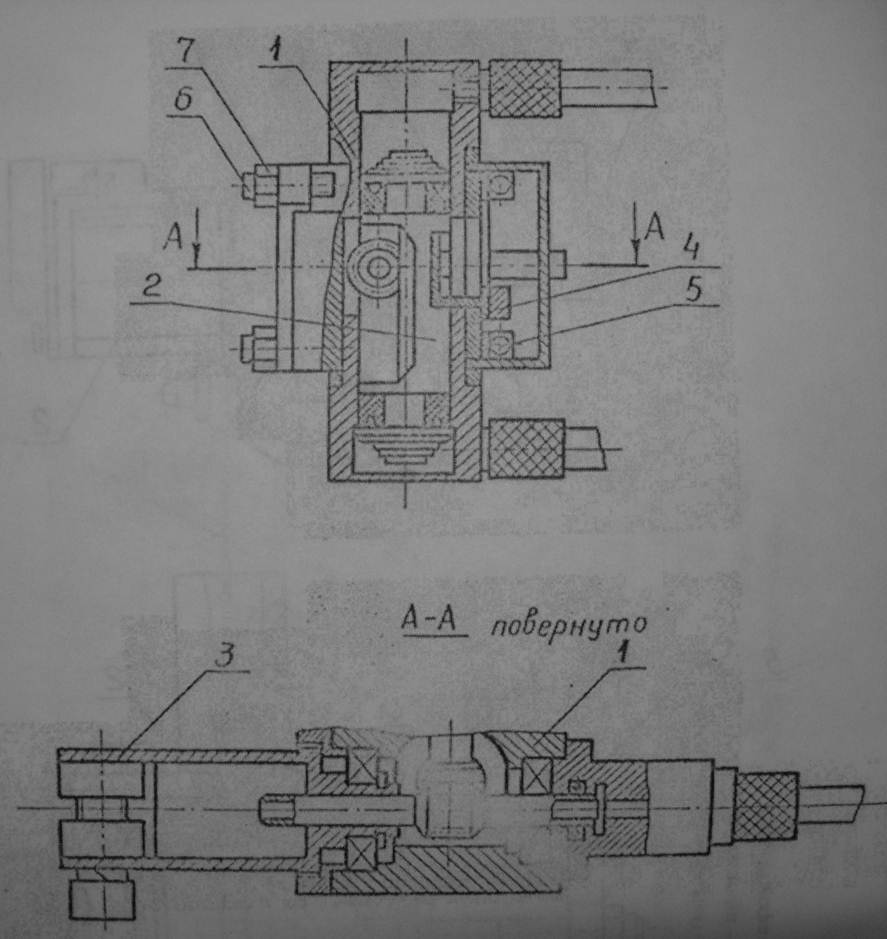
Механизм ротации схвата (рис.6) предназначен для вращения схвата на угол 180° градусов и состоит из корпуса 1, шток-рейки 2, вал-шестерни 3. На шток-рейке 2 установлен магнит 4, взаимодействующий с КЭМами 5.
Схват устанавливается в зажим вал-шестерни 3, в которой имеется отверстие для подвода воздуха к схвату.
При подаче воздуха шток-рейка 2 перемещается, вращает вал-шестерню 3 и, соответственно, схват.
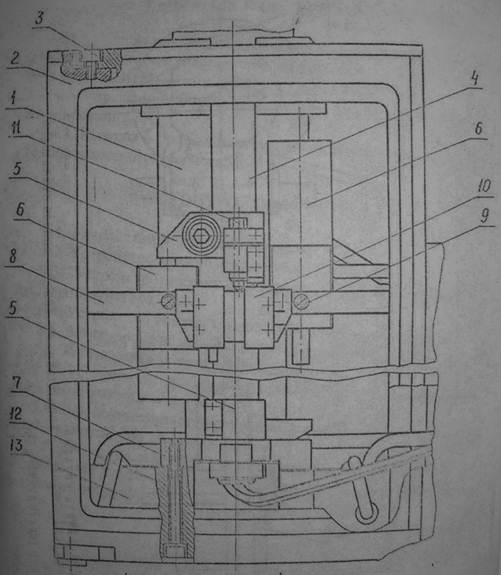
Схват (рис.7) преднахначен для захвата и удержания детали (заготовки) и состоит из корпусов 1, 2 между которыми зажаты шарико-подшипники 3, рычагов взаимодействующих с поршнем 5, пружин 6, 7 и штока 8.
Удержание детали
производится усилиями пружин 6,7. Отпускание детали происходит при подаче
воздуха через полый шток 8, при этом воздух поступает под односторонне
уплотненный относительно штока поршень 5 и далее по винтовой канавке последнего
- в цилиндр А. Поршень 5 перемещается, сжимает пружины 6, 7, и проворачивает
рычаги 4.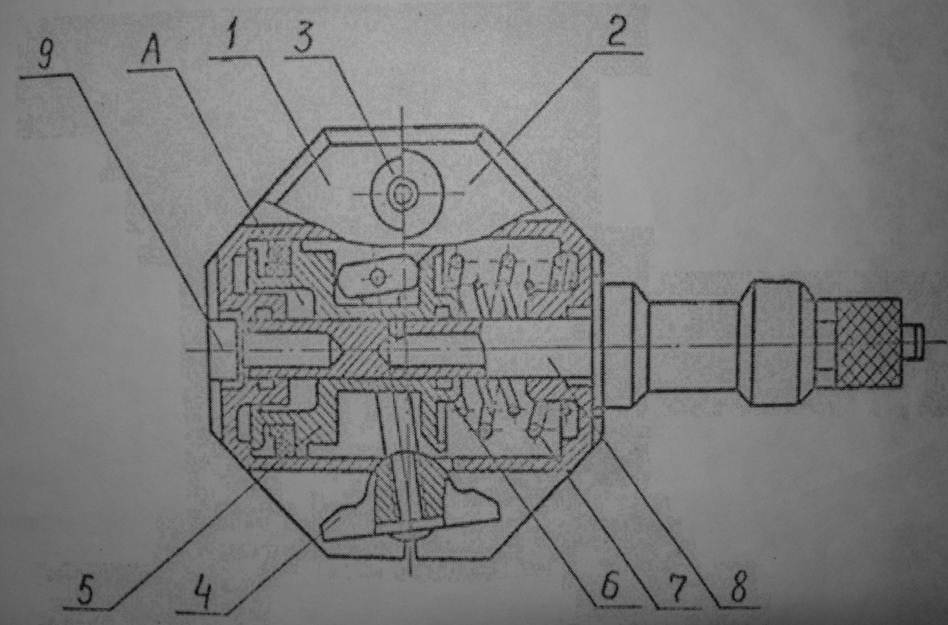
Измерение рабочей зоны МП-11
Максимальное значение рабочей зоны манипулятора "А":
Аmax = 710 мм
Минимальное значение рабочей зоны манипулятора "А ":
Аmin = 525 мм
Максимальное значение рабочей зоны манипулятора "B":
Bmax = 685 мм
Минимальное значение рабочей зоны манипулятора "B":
Bmin = 485 мм
Вертикальный ход:
h = 63 мм;
Вертикальное смещение рабочего органа манипулятора "B":
h' = 14 мм.
Угол поворота:
α = 850;
Объем рабочей зоны:
Объём рабочей зоны манипулятора "А":

Объём рабочей зоны манипулятора "B":

Программирование на базе МПЦУ-2-48-2
Пусть рабочий цикл ПР МП-И задан следующим алгоритмом:
Вверх – назад – вправо – зажим – влево – вперед – вниз – разжим – выдержка времени 1с – конец программы.
В соответствии с таблицей 1, выходы МПЦУ 00... 0А подключены к электропневмопреобразователям У1...У11, включающими движения манипулятора по соответствующим координатам. Каждое последующее движение начинается после окончания предыдущего. Сигналы окончания движения подаются от датчиков Х1..Х10 на входы МПЦУ 00...09. Захват сжимается под действием пружины и не имеет датчиков положения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.