СИСТЕМЫ УПРАВЛЕНИЯ СИНХРОННОГО ЭЛЕКТРОПРИВОДА
Алгоритмы управления систем синхронного электропривода
Назначение и требования к синхронному электроприводу
Синхронные двигатели применяются в электроприводах, обеспечивающих постоянную скорость в установившихся режимах. Такие двигатели используются так же, как генераторы реактивной мощности, в системе электроснабжения.
В синхронных электроприводах требуется быстродействующая форсировка возбуждения двигателя при работе привода с резкопеременной нагрузкой и при снижении напряжения сети.
В качестве таких АРВ получили применение статические тиристорные возбудители, выпускаемые электротехнической промышленностью в виде комплектных устройств мощностью от 15 до 74 кВт типа ТЕ8-320 и от 40 до 400 кВт типа КТУ
Автоматическое регулирование возбуждения синхронного двигателя выполняется по различным алгоритмам в статических и динамических режимах
В установившихся режимам регулирование обусловлено требованиями системы электроснабжения, и осуществляется по одному из следующих алгоритмов обеспечивающих стабилизацию тока возбуждения синхронного двигателя (Iв= const); напряжения питания (Uп = const); реактивной мощности, вырабатываемой синхронным двигателем (Q = const); cos φ двигателя (cos φд = const ) и cos φ системы питания (cos φп = const).
Непосредственный контроль некоторых регулируемых величин затруднен, поэтому они оцениваются косвенно
Координатами регулирования в синхронных электроприводах являются ток возбуждения (ток ротора) Iв; ток статора (полный I и его активная Iа и реактивная Iр составляющие); фаза тока статора угол φ ; напряжение (питания Uп реактивная мощность двигателя Q и угол мощности двигателя Θ.
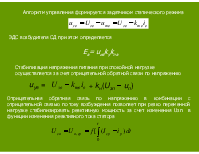
Стабилизация тока возбуждения синхронного двигателя осуществляется при всех алгоритмах управления. Ее необходимость определяется изменениями напряжения питания возбудителя и температуры окружающей среды.
Выбор других алгоритмов управления производится в зависимости от вида нагрузки электропривода.
При плавно изменяющейся нагрузке двигателя, вызывающей колебания напряжения питания, превышающие допустимые значения, используется управление, обеспечивающее стабилизацию напряжения питающей сети ( Uп = const). Это достигается автоматическим регулированием потока реактивной мощности, вырабатываемой или потребляемой синхронным двигателем. Регулируемыми координатами при этом являются реактивная мощность Q, активный Iа и полный I ток статора двигателя. При управлении с алгоритмом Uп =const вводятся ограничения верхнего и нижнего значении тока возбуждения СД, что определяется пределом статической устойчивости двигателя при заданной нагрузке (Iв ≥ Iвmin) и тепловым режимом двигателя (Iв ≤ Iвmax ).
Если нагрузка меняется плавно и колебания напряжения сети незначительны, то осуществляется стабилизация cos φд. Регулируемыми координатами при этом являются угол мощности Θ, а также Iа и I. При переменной нагрузке с превышением ее пиков максимального момента двигателя используются алгоритмы Q =const и cos φд = const.
В крупных синхронных электроприводах, работающих с равномерной или плавно меняющейся нагрузкой с большим резервом мощности в сети и колебаниях напряжения питания, не превышающих допустимые значения, применяется стабилизация соs φп.
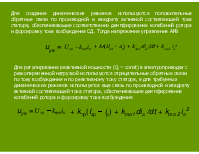
При резкопеременной и знакопеременной нагрузках стабилизируется реактивная мощность двигателя (Q = const). При этом обеспечиваются минимальные колебания питающего напряжения
Стабилизация реактивной мощности одновременно обеспечивает максимальное значение вырабатываемой синхронным двигателем реактивной мощности, ограничиваемой его допустимым тепловым режимом. При недостатке реактивной мощности алгоритм Q = const обеспечивает минимум потерь энергии. Регулируемыми координатами при стабилизации реактивной мощности являются Q, Iа и I.
Для осуществления требуемых динамических режимов при возмущающих воздействиях в системе электропривода используются гибкие обратные связи по производной активной составляющей тока статора, обеспечивающей демпфирование колебаний ротора при набросе нагрузки на вал СД, и квадрату активного или полного тока статора, повышающей быстродействие системы автоматического регулирования за счет форсирован тока возбуждения.
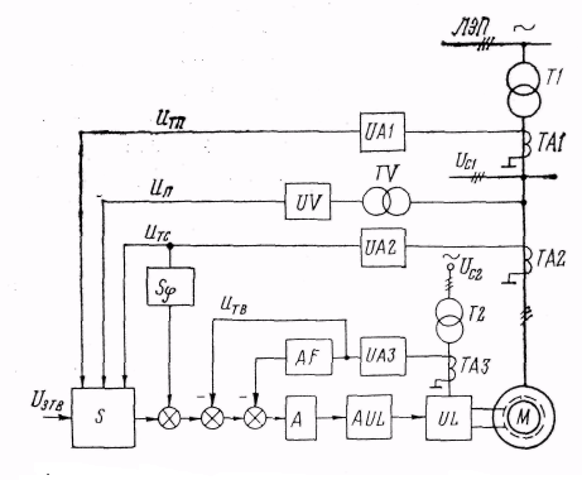
Система управления синхронного электропривода с суммирующим усилителем
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.