Корректирующие связи по производной и квадрату активного тока статора выполняются в виде дифференциального регулятора (ДР) AD и регулятора форсировки (РФ) AL
Д Р обеспечивает демпфирование колебаний ротора при набросе нагрузки на вал СД. В этом случае передаточная функция системы регулирования равна
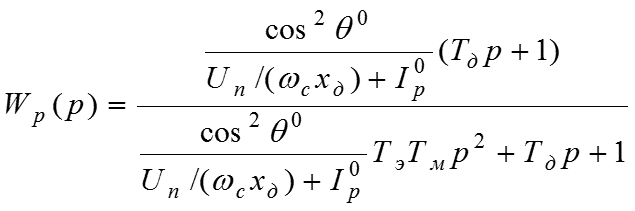
Оптимальный коэффициент демпфирования колебаний получается при
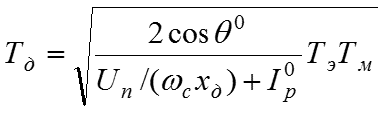
Это реализуется введением ДР с передаточной функцией

где T1 =
; Т2 = Т1 - Тктр; Тктр — постоянная времени замкнутого контура регулирования реактивного тока
Регулятор форсировки возбуждения АL осуществляет форсировку тока возбуждения, пропорциональную сигналу квадрата активной составляющей тока, формируемому квадратичным преобразователем U. Постоянство знака сигнала обратной связи по iа обеспечивает устройство выделения модуля АР
Системы частотного управления синхронного электропривода
При необходимости регулирования скорости и момента СД его обмотка статора питается от преобразователя частоты, обеспечивающего регулирование частоты и напряжения питания СД
Такие СЭП позволяют обеспечить двухзонное регулирование скорости как вниз, так и вверх от синхронной скорости
При регулировании скорости СД, так же как и в АД, необходимо вместе с регулированием частоты f осуществлять регулирование напряжения U
Cистемы с СД получаются проще из-за отсутствия необходимости стабилизации скорости при изменении нагрузки
Разомкнутые СЭП применяются при продолжительных режимах работы синхронного электропривода, в которых основное значение имеют статические установившиеся режимы
В динамике такие СЭП обеспечивают частотный пуск СД с невысоким быстродействием. При необходимости высоких быстродействий для электроприводов, работающих в кратковременных и повторно-кратковременных режимах, используются замкнутые системы регулирования скорости и момента с управлением преобразователем частоты в функции положения ротора или положения результирующего вектора потокосцепления. Для управления такими СЭП применяется векторное управление.
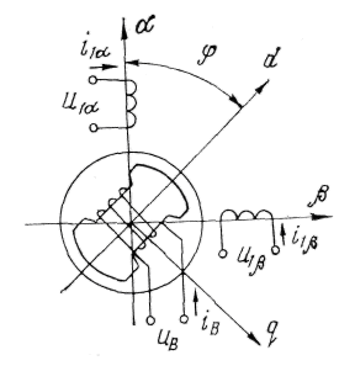
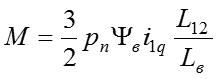
В СД ротор синхронно вращается с полем статора и при работе в двигательном режиме ротор отстает от поля статора на угол Θ = φо - φ, где φо = ωоt — угол, определяемый вращением поля статора, а φ = ωt — вращением (положением) ротора.
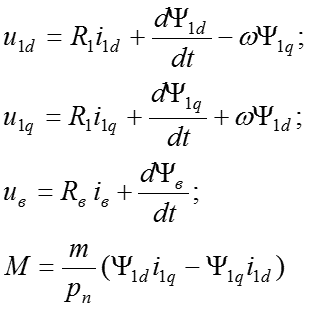
Потокосцепления с учетом, что для явно полюсного ротора СД L1d ≠ L1q и L12d ≠ L12q :
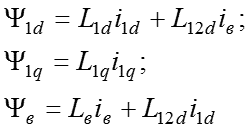
определяющий поле статора, вращается со скоростью поля ротора, отставая от него на угол Θ, как и поле статора
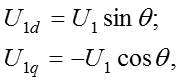
Вектор напряжения статора
![]()
Разработаны различные системы векторного управления СД
Особый интерес представляет система с управлением инвертором ПЧ в функции положения ротора
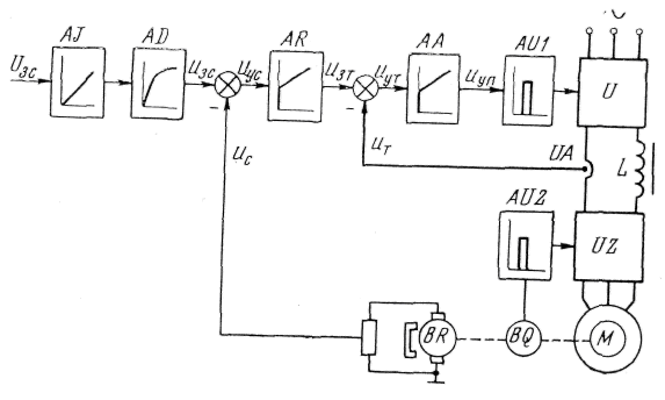
преобразователь частоты, кроме регулирования напряжения и частоты, выполняет роль электронного коммутатора (коллектора), осуществляющего переключение обмоток статора при повороте вала ротора на определенный угол
Переключение фаз обмотки статора СД обеспечивает инвертор с помощью СУИ AU2, представляющей собой формирователь и распределитель импульсов, управляющих переключением тиристоров переключение осуществляется в функции угла поворота вала ротора φ, контролируемого и задаваемого датчиком положения BQ угол Θ не зависет от момента нагрузки и определяется лишь начальной установкой датчика, т. е. его ориентированием относительно геометрических осей машины. Поэтому электропривод с ВД более устойчив, чем с СД, так как у него нет склонности к качаниям ротора и возможности потери статической устойчивости, поскольку процесс коммутации тиристоров UZA происходит только при повороте poтоpa на угол φр.
Для упрощения конструкции ВД на его роторе вместо обмотки возбуждения используются постоянные магниты, что исключает применение коммутационного вращающегося узла в роторе
Однако ВД лишили основного положительного свойства СД —независимости скорости от нагрузки. В механических характеристиках ВД появился статизм, что в общемто не является большим недостатком и легко исправляется в СЭП с подчиненным регулированием координат
В вентильном двигателе значительное размагничивающее действие оказывает реакция якоря, что возможно исправить, если включить обмотку ротора последовательно в звене постоянного тока скомпенсировать влияние реакции якоря увеличением потока возбуждения пропорционально току статора СД. Тогда получается машина последовательного возбуждения с ее мягкими нелинейными механическими характеристиками.
Синтез регуляторов тока и скорости производится по структурной схеме, применяемой для СЭП постоянного тока
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.