Поясним происхождение определения “базисный”. Переменные x1, x2, …, xm носят название базисных потому, что они соответствуют некоторому базису – совокупности m линейно независимых векторов, по которым разлагается вектор свободных членов (вектор коэффициентов ограничений) системы уравнений:
A1x1 + A2x2 +…+ Amxm = B .
В этом разложении в качестве векторов базиса выступает часть векторов-столбцов матрицы системы, а базисные переменные являются коэффициентами разложения вектора B по этому базису. (Упомянутое соответствие базису состоит в равенстве номера переменной номеру столбца системы уравнений AX=B ).
Замечание 2.14. В примере 2.1 вектор B был разложен по базису A1 , A2 , A3 в виде
Рассмотренный выше путь решения системы уравнений с n > m не позволяет в большинстве случаев непосредственно решить задачу ЛП. Для этого необходимо предварительное преобразование исходной задачи ЛП в канонической форме в каноническую базисную форму вида
 ,
i=1,…,m (2.12)
,
i=1,…,m (2.12)
(Такая форма совпадает с приводимой ранее формой (2.5)).
Коэффициенты a¢ij и b¢i в (2.12) определяются путем специальных эквивалентных преобразований коэффициентов aij и bi формы (2.4). (Такие преобразования были выполнены, в частности, при получении второй системы в примере 2.1 [4].)
Базисными переменными системы (2.12) являются переменные x1, x2, …, xm. Нетрудно заметить, что векторы-столбцы, соответствующие этим переменным, составляют единичный базис системы (2.12):
A1 = ![]() , A2
=
, A2
= ![]() , … , Am =
, … , Am = ![]() .
.
По такому базису разлагается как вектор B, так и остальные столбцы матрицы A.
Рассматриваемые базисные векторы образуют единичную подматрицу матрицы условий A. Наличие такой подматрицы позволяет просто найти решение системы, а именно, базисные переменные будут определяться на основе (2.12) из соотношений:
![]() , i=1,…,m , а
базисное решение системы уравнений будет иметь вид
, i=1,…,m , а
базисное решение системы уравнений будет иметь вид
x1= b¢1 , x2 =b¢2 , …, xm = b¢m , xm+1= 0 , …, xn = 0 . (2.13)
Отметим, что структура базисного решения совпадает со структурой введенного ранее опорного плана. Действительно, в случае неотрицательности коэффициентов ограничений (т.е. выполнение условий bi ³ 0) полученное таким образом базисное решение будет также являться и опорным (а также, естественно, и допустимым). Отметим наличие связей между рассмотренным базисным решением и введенными ранее понятиями, характеризующими решения задачи ЛП. Эти связи иллюстрируются на рисунке 2.3.
|
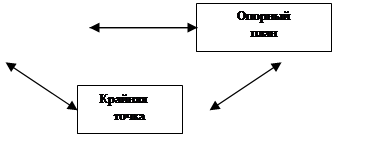 |
Рис. 2.3
2.5.2. Метод исключения Жордана-Гаусса.
Рассмотрим далее так называемый метод исключений Жордана-Гаусса. В рамках вопросов, связанных с симплекс-методом, он играет двоякую роль.
Во-первых, он позволяет преобразовать систему уравнений AX=B общего вида (2.9) в систему уравнений в базисной форме вида (2.12), допускающую простое получение базисного решения системы. (Именно в результате трехкратного применения такого эквивалентного преобразования была получена вторая система в примере 2.1 [4]).
Во-вторых, он является одним из этапов симплекс-метода.
Метод исключений Жордана-Гаусса позволяет решить систему преобразованием ее к эквивалентной системе с единичным базисом или установить ее несовместность. В процессе преобразований при необходимости может быть построена также обратная матрица.
На каждом шаге исключений одна из переменных становится базисной: исключается из всех уравнений, кроме одного, где остается с коэффициентом 1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.