Например, на рис.2.14 приведены амплитудо-частотные характеристики элементов копировально-фрезерного станка модели 6Б444 (ЛСО им. Я.М.Свердлова, г. Санкт-Петербург), полученные при гармонических возмущениях, направленных по ходу стола изделия (ось X), с амплитудой 1000 Н. При этом, кривые соответствуют: 1 перемещению стола копира, 2 - стола изделия, 3- стойки копировального прибора, 4- шпиндельной бабки. Сплошные линии соответствуют включенным фрикционным демпферам направляющих обоих столов, а пунктирные - отключенным демпферам. Жесткость исполнительных механизмов подач столов (ось X) составляла 450 Н/мкм, поперечины (ось Y) - 500 Н/мкм, бабки (ось Z) - 250 Н/мкм. Суммарные люфты на холостом ходу станка (без резания) при включенных демпферах (0,03 - 0,04) мм, а при отключенных - не более 0,01 мм.
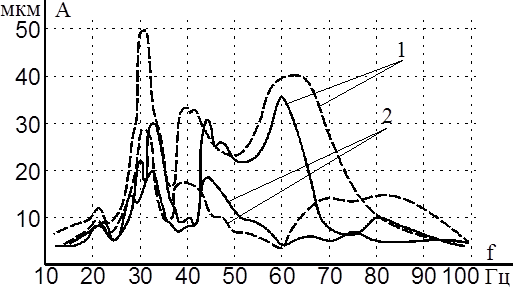
а)
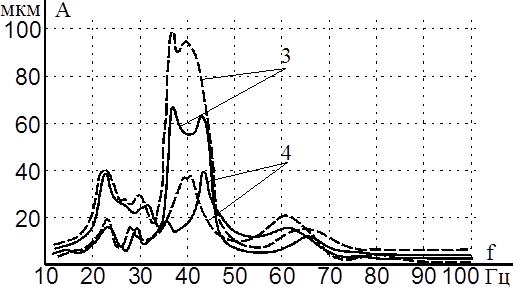
б) Рис.2.14
При этом можно выделить следующие зоны резонансных частот колебаний:f1»(60-65)Гц - стола копира относительно стола изделия; f2»(32-35)Гц, массы стола и ИМ подачи; f3»(37-42)Гц - стойки копировального прибора; f4»(40-44) Гц - шпиндельной бабки относительно стойки в горизонтальной плоскости; f5»(23-26)Гц - стойки со шпиндельной бабкой в вертикальной плоскости. Эти экспериментальные данные наглядно подтверждают необходимость повышения устойчивости всех основных частей станка.
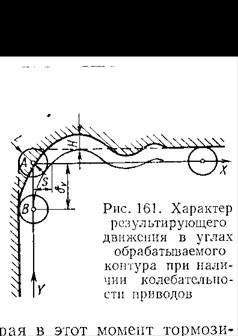
Другой пример, на рис.3. 14 (161) показана картина "перебега" при обработке на фрезерном станке прямоугольной выемки металла. Естественно, величина "перебега" "Н" целиком определяет полученную шероховатость сторон угла и точность обработки изделия. Перебег Н получен в результате колебательного изменения скорости подачи фрезы при обработке угла. Поэтому в приводах подач многокоординатных станков просто необходим апериодический переходный режим отработки перемещений. Это и определяет повседневную важность излагаемой темы лекции
10.2. Краткая история финитного управления
(дополнительные, ознакомительные, необязательные материалы)
10. 2. 1. Обзор исходных основополагающих работ по финитному управлению
Финитное управление возникло и развивалось как особая ветвь оптимального управления. Проблема создания аналоговых и цифровых финитных систем автоматического управления (ФСАУ) стала обсуждаться в научно-технической литературе ещё в 50-60-е годы При этом в основу ее решения закладывались критерии оптимальности, сформулированных еще в 30-40 годы XX века (см. рис. 4.14). Затем, А.А.Фельдбаумом3) в 1949-1953 г.г. была выдвинута идея и доказана теорема о законе переключения управляющего сигнала g(t) = sign Gмакс, обеспечивающего максимальное быстродействие в релейной САУ с линейным аналоговым объектом, модель которого имеет "m" порядок. При создании финитных ДСАУ принцип релейного управления аналоговым объектом с числом переключений "m", был трансформирован, в цифровой способ управления таким же объектом с "m" интервалами квантования, но с изменяющейся величиной управляющего сигнала. Последнее условие согласовалось с идеей построения оптимальных по быстродействию систем, сформулированной в то время А.Я.Лернером.4)
На рис.5.14 изображена упрощенная функциональная схема рассматриваемой системы, которая содержит цифровое управляющее устройство (ЦУУ), включающее аналого-цифровой преобразователь (АЦП) с импульсным элементом (ИЭ), цифровой регулятор (ЦР) и цифро-аналоговый преобразователь (ЦАП) с импульсным элементом и экстраполятором нулевого порядка; УМ - усилитель мощности, О - объект управления.
Для реализации режимов "малых" перемещений в следящих электромеханических системах (ЭМС) оказались наиболее пригодными финитные цифровые принципы их построения. Первоначально (50-е годы) (см. рис. 4.14), были сформулированы два основных методов их конструирования. Первый - предполагал использовать в качестве базового критерия линейную интегральную (суммарную) оценку (ЛИО) оптимальности динамического процесса САУ. Во втором методе базовой является квадратичная интегральная оценка (КИО) [3]. Дальнейшее совершенствование финитных дискретных САУ (ФДСАУ) в 70-е годы привело к существенному развитию обеих методов их конструирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.