2. Ограничение по моменту электродвигателя:
Основное уравнение динамики привода:
![]() , (26.
14)
, (26.
14)
где Мд момент, развиваемый двигателем, Мс момент статических сопротивлений (исполнительного механизма), J суммарный "приведенный к валу двигателя" момент инерции вращающихся элементов ОУ и ротора двигателя.
Пусть нет статического момента Мс=0, тогда:
 (27. 14)
(27. 14)
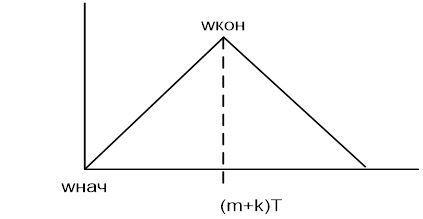
Рис. 10. 14. Диаграмма рационального субоптимального
динамического процесса в ЭМС
Недостатки финитного дискретного управления.
1. Финитные регуляторы не являются грубыми, – они чувствительны к вариациям параметров.
2. Апериодические цифровые регуляторы работают по другим законам, нежели аналоговые регуляторы (см. рис. 11. 14). Поэтому в дискретных и аналоговых САУ апериодические переходные процессы существенно различаются.
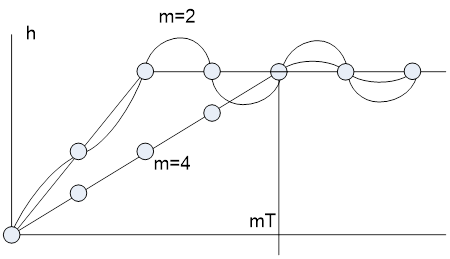
Рис. 11. 14. Переходные функции различных финитных САУ
3. С высокочастотными выбросами между точками квантования в ФДСАУ пока не научились бороться.
Решим задачу выбора финитного привода подачи для металлорежущего станка.
Для выбора типа двигателя в ОУ используем уравнения (26. 14), (27. 14) и тахограмму (рис.10. 14). Прежде всего сравним технические данные пригодных для этой цели двигателей.
Двигатели постоярного тока. 1. Типа ПБСТ - 32, Uном=220 В, Iном= 6,5А, Рном=1,2 квт., ωном=157 рад/с, Мном=7,6 Нм, Ммакс=4 Мном, момент инерции якоря (ротора), Jпр=0,025 кгм2.
2. Типа ПГТ -1, Uном=60 В, Iном= 20,4А, Рном=1,0 квт, ωном=314 рад/с, Мном=3,2 Нм, Ммакс=8 Мном, момент инерции якоря (ротора), Jпр=8*10-4 кгм2.
Двигатель переменного тока. 1. Типа 4А80А4УЗ Uном=220 В, Iном= 6,5А, Рном=1,1 квт, ωном=147,65 рад/с, ωс=157 рад/с, Мном=7,5 Нм, Ммакс=2 Мном, момент инерции якоря (ротора), Jпр=0,0032 кгм2.
Степень "m" уравнения математической модели ОУ, с учетом упругости исполнительного механизма, по угловому перемещению для приводов постоянного тока m=5 и переменного тока m=6.
Решая уравнение (27. 14) при Мс=0, ωнач=0 и Т=2мс=2,0*10 -3 с получим:
Для двигателя ПБСТ - 32 ![]() , k>127,
, k>127,
для двигателя ПГТ - 1
![]() k>5,
k>5,
для двигателя
4А80А4УЗ ![]() k>28.
k>28.
Таким образом, реально построить финитное управление в приводе подачи можно только на двигателе ПГТ - 1. В приводе переменного тока финитное управление можно реализовать не на двигателе 4А80А4УЗ общепромышленного применения, на иной электромашине с лучшими динамическими параметрами.
При выборе структуры финитной САУ предпочтение отдадим подчиненному принципу реализации регуляторов, т. е. СПУ. Мы, "вскольз," упомянули об этом ранее. Теперь сделаем подробные пояснения на основании рис.10. 14. Чтобы получить такую тахограмму, в соответствии с уравнением (26. 14), необходимо обеспечить на интервале "разгона" привода +М д. макс, а на интервале его торможения - (минус) М д. макс.. Такую задачу наиболее удачно выполнит "релейный" регулятор тока РТ (см. рис. 8. 14) с настройками (+Iмакс=const) и ( - Iмакс=const).
Естественно, тогда регулятор скорости РС будет
воспроизводить треугольную диаграмму (тахограмму скорости), а регулятор
положения РП (при пропорциональной настройке) угол отработки ![]() ,[рад]
(28. 14)
,[рад]
(28. 14)
![]()
Исходный оригинал Дениса Мокринского гр.4083/2 08.06.08. Скорректировано многократно: 16.10.08.; 08.11.08.; 10.11.08.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.