Вывод. При реализации импульсных систем не слишком важна форма модулирующего импульса. Но практически наиболее просто реализовать (в математической модели и в реальной установке) прямоугольный импульс. Поэтому и в теории ДСАУ, в качестве основного модулирующего импульса принимают прямоугольный, хотя возможны и другие варианты.
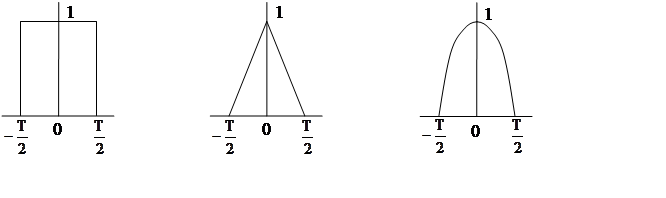
1) Прямоугольная 2) Треугольная 3) Косинусная
 Рис.7. В.
Рис.7. В.
В. 5. Виды модуляции, используемые в импульсных системах
1) Модуляция с изменением амплитуды импульса (АИМ) (см. Рис.8. В.)
При этом виде модуляции выходной сигнал имеет форму такого же импульса, с теми же временными параметрами, но измененного по амплитуде
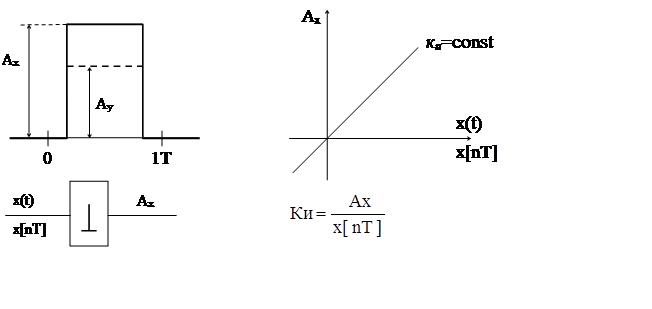
Рис.8. В
В силу такой характеристики коэффициента передачи (коэффициента крутизны) модулятора ки, амплитудно-импульсную модуляцию (АИМ) называют линейной. Чаще всего ки =1.
2) Модуляция с изменением ширины импульса (ШИМ) (см. Рис. 9.В.)
![]()
![]() -
коэффициент крутизны импульса (
-
коэффициент крутизны импульса (![]() каппа),
каппа),
![]()
![]() -
относительная продолжительность импульса.
-
относительная продолжительность импульса.
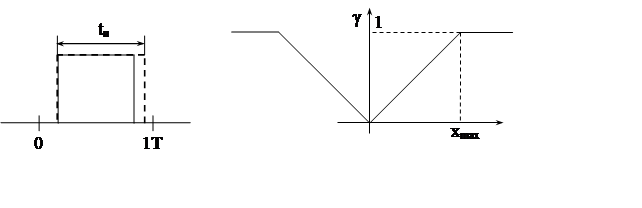
Рис.9.В
Преобразование информации с помощью ШИМ является нелинейным. На графике видно, что ШИМ обладает статической четно - симметричной нелинейностью, если использовать однополярные импульсы. В реальных импульсных устройствах с ШИМ, кроме статической, присутствует еще и динамическая нелинейность. Например, усилители мощности, используемые в регулируемых электроприводах постоянного тока (широтно-импульсные преобразователи), имеют оба вида нелинейностей.
Рассмотрим еще 2-х полярную ШИМ (рис. 10. В). В этом устройстве на протяжении одного интервала квантования Т формируются два импульса tи1 и tи2 противоположной полярности. Статическую характеристику устройства
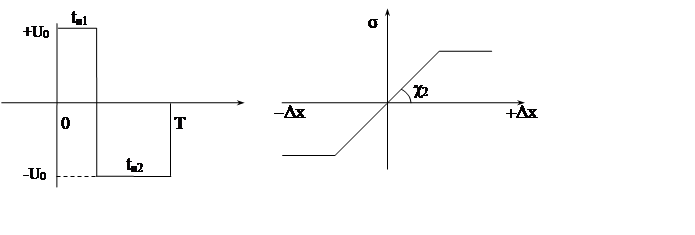
Рис.10. В.
можно рассчитать следующим образом.
Среднее значение входного сигнала преобразователя на интервале Т будет:
Dx=x1-x2; где x1 и x2 значения входных сигналов, формирующих выходные сигналы преобразователя с амплитудой +U0 и - U0 длительностью tи1 и tи2.
Коэффициент крутизны
двухполярного модулятора χ2 определим аналогичным образом, учтя,
что ![]()
![]() и
и
![]() .
.
Тогда
χ2![]() , где
σ =2γ1-1.
, где
σ =2γ1-1.
Двухполярную модуляцию следует применять в ДСАУ с широким диапазоном регулирования выходной координаты (например, скорости электропривода ω). Поясним это.
Примем во внимание, что невозможно технически сделать
электронное устройство (преобразователь напряжения в ширину импульса) без относительной
зоны нечувствительности. Поэтому при однополярной ШИМ можно получить γmax=(0,98![]() 0,99)≈1 и γmin=(0,02
0,99)≈1 и γmin=(0,02![]() 0,01)≈0. Соответственно максимальное напряжение
преобразователя
0,01)≈0. Соответственно максимальное напряжение
преобразователя ![]() пропорционально
пропорционально ![]() и
и ![]() пропорционально
пропорционально
![]() . Поэтому
диапазон регулирования скорости "d" получим
не более
. Поэтому
диапазон регулирования скорости "d" получим
не более ![]() .
.
При двухполярной модуляции ![]() при
при
![]() , поэтому диапазон регулирования
в таких преобразователях d
, поэтому диапазон регулирования
в таких преобразователях d![]()
![]() . Кроме того, модулятор приобретает нечетно - симметричную
статическую характеристику.
. Кроме того, модулятор приобретает нечетно - симметричную
статическую характеристику.
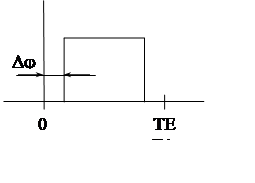
3) Фазоимпульсная модуляция (время импульсная модуляция) (ФИМ, ВИМ). Коэффициент крутизны таких модуляторов вычисляется по формуле:
χ ![]() . Здесь меняется только фаза
импульса (см. Рис. 11. В).
. Здесь меняется только фаза
импульса (см. Рис. 11. В).
 Часто
используют еще частотно - импульсную модуляцию (ЧИМ).
Часто
используют еще частотно - импульсную модуляцию (ЧИМ).
Модуляцию различают еще и по роду.
При модуляции первого рода модулятор воспроизводит на выходе значение входного сигнала в моменты квантования (АИМ - I, ШИМ - I и т.д.)
Рис. 11. В.
При модуляции второго рода модулятор воспроизводит на выходе значение и форму сигнала в период квантования (АИМ - II, ШИМ - II и т.д.). Но такие модуляторы используют сравнительно редко.
Скорректировано 08 и 11 02.09. Скорректировано 14.02.10 и 04.04.2011, 12.01.12
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.