Примеры Использование дискретных сигналов и ДС во многих случаях обусловлено техническим устройством средств рационального приема, передачи и преобразования информации.
В промышленности дискретные системы (ДС) (как "регуляторы прямого действия")*) с широтно - импульсной модуляцией (ШИМ) или с релейным управлением изредка применяли еще в конце XIX века. В основном, это были регуляторы температуры.
Однако бóльший интерес к дискретнымсистемам стал проявляться только в конце 30-х годов ХХ века, когда появились радиолокационные установки - радары, представлявшие собой типичные дискретные системы с широтно-импульсной (ШИМ) или фазоимпульсной модуляцией (ФИМ). Поэтому с конца 40-х годов стала интенсивно развиваться и теория ДСАУ.
Изображения (рис 2. В.)**) поясняют принцип работы автоматического поддержания заданной высоты полета летательного аппарата с помощью радиолокационного дальномера (рис. 2. В, а.).
Передатчик (задающее устройство) излучает импульсы с постоянным периодом Т. Эти импульсы, отражаясь от земли, принимаются антенной радиолокатора с задержкой τ D (рис.2. В, б), пропорциональной высоте полета, в дискретные моменты времени H[nT],(см. рис.2. В, в). Задержка τD используется для построения ДСАУ с ШИМ или ФИМ. Сигнал рассогласования между заданной H0[nT] и измеряемойвеличиной высоты полета H0 [nT] - H[nT] =е [nT], управляет следящими приводами рулей высоты полета.
________________________________________________________________________
*)Напомним, что "регуляторами прямого действия" называют простейшие САУ без усилителя мощности, в которых сигнал рассогласования e(t) непосредственно управляет объектом.
**)Нумерация рисунков будет двойная: первая цифра указывает его порядковый номер, а вторая цифра номер лекции. Такой же принцип и нумерации формул. Запомните это!
. Номера литературных источников по общему списку в квадратных [] скобках. Рекомендованная студентам литература содержит два - три наименования, но источников для подготовки курса использовано много больше. Поэтому они и упоминаются.
2. Другой, актуальный, пример. Строительство трубопроводов и других грандиозных технических сооружений на морских шельфах вновь вызвало большой интерес к подводным роботам. Российский "Газпром" и другие мировые концерны выделяют крупные средства на эти разработки. Одно из главных назначений подводных роботов обеспечивать контроль и проверку исправности подводных технических объектов (см. рис 3. В.).
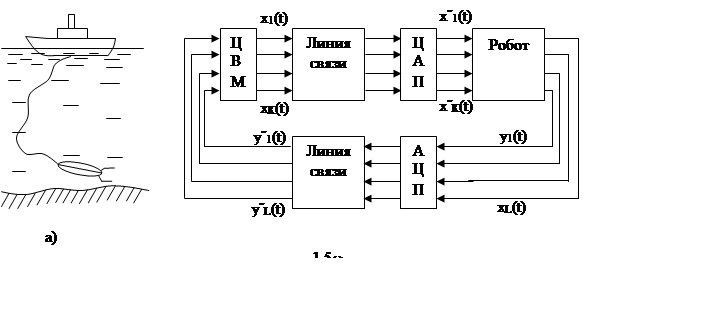
Рис. 3. В.
Программа управления движениями робота и всеми другими его функциями (Рис 3. В, а) вырабатывается ЦВМ, расположенной на корабле - базе, и в виде цифровых кодов переменных состояния задания x1(t) xk(t) передаются по кабелю связи (Рис.2.В, б). Далее, эти сигналы цифро-аналоговыми преобразователями (ЦАП) трансформируются в аналоговую форму и управляют всеми приводами и другими исполнительными устройствами робота. Группа переменных состояния выходных координат робота y1(t) yq(t) подвергается аналог - цифровому преобразованию (АЦП) и в цифровом (кодовом) виде по линиям обратной связи подается в ЦВМ. Таким образом, здесь реализуется взаимосвязанная (многоканальная) цифровая автоматическая система (ЦАС).
В. 2. Краткая история ДСАУ
(Дополнение.)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.