Для обеспечения полного использования сцепных возможностей обоих колес дифференциал необходимо блокировать. В этом случае реализуемый ведущим мостом вращающий момент равен сумме моментов по сцеплению обоих колес. При Pz1=Pz2=Pz/2.
![]() . (10.12)
. (10.12)
Суммарная нормальная реакция опорной поверхности на оба ведущих моста Pz1+Pz2=Pz. Тогда
![]() (10.13)
(10.13)
Свойствами самоблокирования обладают шестеренные дифференциалы с фрикционными элементами и муфтами свободного хода, кулачковые червячные и пр., которые характеризует коэффициент блокировки Кбл.
Суммарный вращающий момент, реализуемый обоими колесами ведущего моста с дифференциалом повышенного трения выразится как
![]() . (10.14)
. (10.14)
Зависимость необходимого коэффициента блокировки дифференциала Кбл.φ от отношения коэффициентов сцепления отстающего φmin и забегающего φmax колес (рис. 10.4) определится из выражения
![]() (10.15)
(10.15)
Современные конструкции дифференциалов повышенного трения обеспечивают Кбл=0,3-0,6. У обычных шестеренчатых конических дифференциалов Кбл=0,05-0,10.
Эффективность блокирования ведущих колес в значительной мере зависит от своевременности включения механизма блокировки дифференциала. Для этого применяют противобуксовочную систему (ПБС) с электронным уравнением. Включение блокировки осуществляется автоматически на основе анализа информации об изменении угловых скоростей ведущих колес и угла поворота рулевого колеса. Если наступает буксование всех ведущих колес, ПБС уменьшает подачу топлива в двигатель, в результате снижается вращающий момент на ведущих колесах и уменьшается их скольжение. Обычно ПБС и АБС объединяют в единую систему.
В двухосных полноприводных автомобилях с равномерным распределением нормальных нагрузок между ведущими мостами применяют симметричный межосевой дифференциал, устройство и характеристики которого аналогичны межколесному дифференциалу.
Если нормальные нагрузки на мосты различаются существенно (в 1,8-2,0 раза), то используют несимметричный дифференциал.
Суммарный реализуемый момент ведущими мостами полноприводного автомобиля с межосевым симметричным дифференциалом определяется по формуле
![]() (10.16)
(10.16)
где n – общее количество ведущих мостов; М(φmin) – минимальный момент, реализуемый ведущим колесом, находящимся в наихудших условиях по сцеплению.
Значение кинематического параметра К несимметричного межосевого дифференциала выбирают из условия
![]() , (10.17)
, (10.17)
где
![]() – суммарные нормальные реакции на колеса
соответственно переднего и заднего мостов неподвижного автомобиля на
горизонтальной поверхности.
– суммарные нормальные реакции на колеса
соответственно переднего и заднего мостов неподвижного автомобиля на
горизонтальной поверхности.
Межосевые дифференциалы также ухудшают проходимость автомобиля. Поэтому на полноприводных автомобилях применяют блокированный привод ведущих мостов с их принудительным или автоматическим отключением.
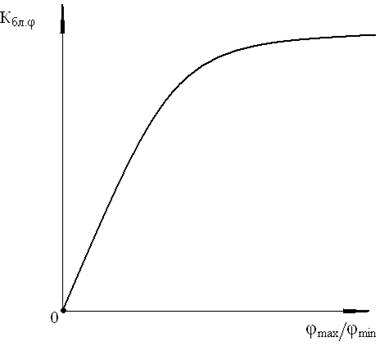
Рисунок 10.4 – Зависимость Кбл.φ от отношения коэффициентов сцепления отстающего и забегающего колес
Ведущие колеса автомобиля при блокированном приводе вынуждены вращаться с одинаковыми угловыми скоростями, независимо от условий движения (поворот автомобиля, неровности дороги, различные нагрузки на колеса и т.д.). Упругие свойства валов трансмиссий и шин обеспечивают лишь колебания угловых скоростей относительно среднего значения.
Значения вращающих моментов на ведущих колесах Мкj многоосного полноприводного автомобиля могут быть как положительными, т.е. направленными в сторону вращения колес, так и отрицательными, в частном случае – равными нулю. При отрицательном моменте мощность поступает не от трансмиссии к колесу, а наоборот – от колеса к трансмиссии и далее через механизмы трансмиссии к другим ведущим колесам. В результате происходит циркуляция мощности в некотором замкнутом контуре: колесо-корпус автомобиля-другие колеса-ветвь трансмиссии-колесо. При этом мощность, передаваемую от раздаточного механизма к данному колесу, можно условно разделить на два потока: мощность, необходимую для преодоления сопротивления движению автомобиля, и бесполезную мощность, циркулирующую в замкнутом контуре.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.