;(Y1 устанавливается в '1', а через 90мс снова сбрасывается в '0')
;Загрузка счетчика канала 0.
mov al,00000001b ;Устанавливаем сигнал Y1 в единицу
out [52h],al
mov cx,9000
call DELAY
;Сигнал Y1 переводим в состояние 0.
xor al,al
out [52h],al ;
notY1: ; Если f1 равна 0 - ничего не делаем
sti ;Разрешение аппаратных прерываний.
Необходимо обеспечить:
· Чтение значений Х1,Х2,Х3,Х4.
· Преобразование формата хранения сигналов к удобному для обработки
· Вычисление логической функции f1 = X1+X2+X3+X4
· Вычисление значения Y1
· Формирование Y1 длительностью Т1 = 90мс.
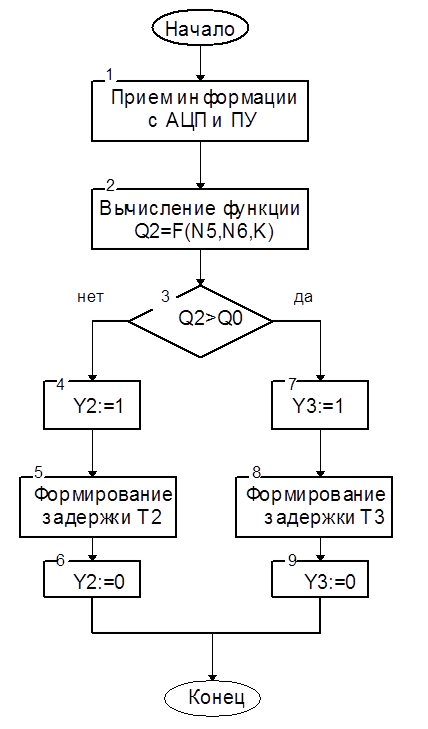
Схема алгоритма чтения сигналов X5, X6 и формирования сигналов Y2, Y3 представлена на рис. 29
|
Рис.29. Схема алгоритма выработки сигналов Y2 и Y3. |
Следует отметить, что чтение сигналов X5, X6 с АЦП происходит за 2 цикла (см. п. 3.11).
;Чтение значения N6
out [61h],al
in al,[58h]
mov ah,al
;Чтение значения N5 (2 такта)
out [60h],al ;защелкивается адрес канала на АЦП
in al,[58h] ;считывание цифрового эквивалента Х5 из АЦП
Ввод напряжения Х7 с АЦП происходит аналогично за 2 такта. На основании N7 – цифрового эквивалента сигнала Х7 – вычисляется Q4 = A0 + A1 * N7.
Константы A0, A1 – представляются в форме с фиксированной запятой.
A1 = 0.25 = 80h; A0 = 0.17 = 31h
Значение Q4 необходимо сохранить в памяти, чтобы в любой момент выдать его по требованию. Сигнал Q4 пишем порт А ППИ для выдачи на ЦАП, на выходе ЦАП появляется Y4.
Листинг программы приведен в приложении 2.
В процессе выполнения курсового проекта была изучена работа типовых узлов, входящих в микропроцессорную систему и их программирование, принципы организации запоминающих устройств в вычислительной технике, принципы построения микропроцессорных систем на базе 16 разрядных процессоров и разработки программного обеспечения.
В ходе курсового проектирования была разработана микропроцессорная система, построенная на МП КР1810ВМ86, с использованием быстродействующих микросхем серий КР580, КР1533, и К1118. МПС имеет ПЗУ, объемом 16 КБайт и энергонезависимое ОЗУ, объемом 4 КБайта. МПС обрабатывает 4 сигнала от двоичных датчиков и 3 аналоговых сигнала в соответствии с заданными алгоритмами, и выдает 3 двоичных сигнала заданной длительности и один аналоговый. Особенностью данной МПС является использование нескольких источников питания, необходимых для корректной работы некоторых устройств, входящих в состав данной МПС (например, ЦАП и АЦП).
МПС управляется 19-клавишным пультом управления и имеет однострочный дисплей, состоящий из трех семисегментных индикаторов. Длительность цикла работы программы МПС - 0,4 мс.
1. Микропроцессоры и микропроцессорные комплекты интегральных микросхем: Справочник. В 2т./ Н.Н.Аверьянов и др.; Под ред. В.А.Шахнова. — М.: Радио и связь, 1988. — Т.1.- 368 с., Т.2.-368 с.
2. Логические ИС КР1533, КР1534. Справочник. В 2т./И.И.Петровский и др. -М.:Бином, 1993.
3. Применение интегральных микросхем памяти / А.А. Дерюгин, В.В. Цыркин, В.Е. Красовский и др.; Под ред. А.Ю. Гордонова, А.А. Дерюгина.-М.: Радио и связь, 1994.-232с.
4. Федорков Б.Г., Телец В.А. Микросхемы ЦАП и АЦП: Функционирование, параметры, применение/ — М.: Энергоатомиздат,— 320с.
5. Методические указания к курсовому проекту по дисциплине ФУиУ ЭВМ и ССМТ. Дерюгин А.А., Иванов А.В. — М.: Изд-во МЭИ, 1994. — 12с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.