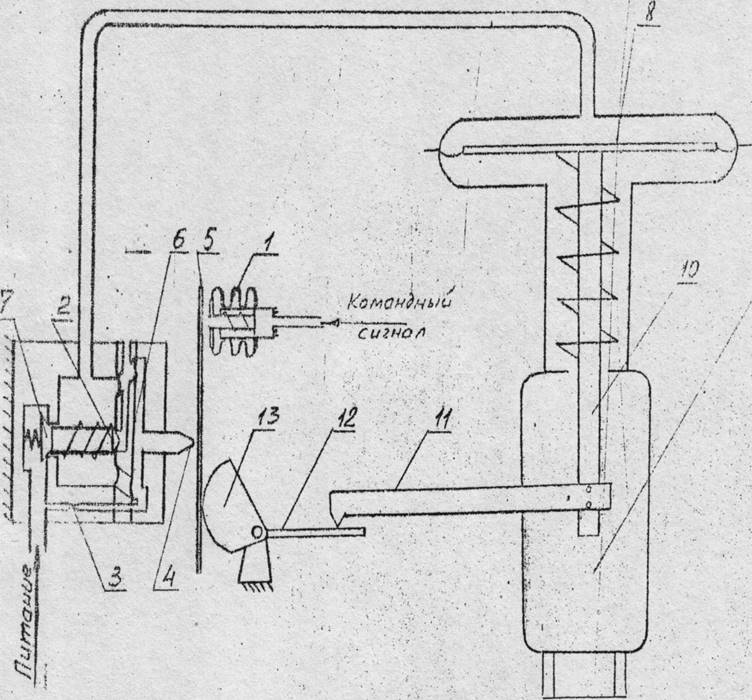
Принцип действия позиционера состоит в следующем: При увеличении командного сигнала сильфон расширяется и воздействует на агрегат коромысла с заслонкой 5, приближая заслонку к соплу. Давление в линии сопла увеличится, и мембрана 6 реле давления приоткроет воздушный клапан 7. Давление на выходе позиционера увеличится.
Мембрана 8 исполнительного механизма 9 прогнется и шток 10 регулирующего клапана переместится вниз.
Посредством рычага II и шпильки 12 позиционера движение штока передается на кулачок обратной связи 13 ,который воздействует на коромысло заслонки, стремясь удалить ее от сопла, т.е. понизить давление воздуха в линии сопла. Понижение давления в линии сопла ведет к прикрытию воздушного клапана.
При изменении давления командного сигнала движение штока регулирующего клапана происходит до тех пор, пока позиционер снова не придет в равновесие, но при новом значении командного сигнала и при новом положении штока регулирующего клапана
В верхней части позиционера (позади манометров контроля параметров) имеется рычаг для включения и отключения позиционера. При повороте рычага в положение "байпас" - позиционер выключается из работы, а сигнал от командного прибора по байпасному каналу поступает на мембрану исполнительного механизма.
|
|
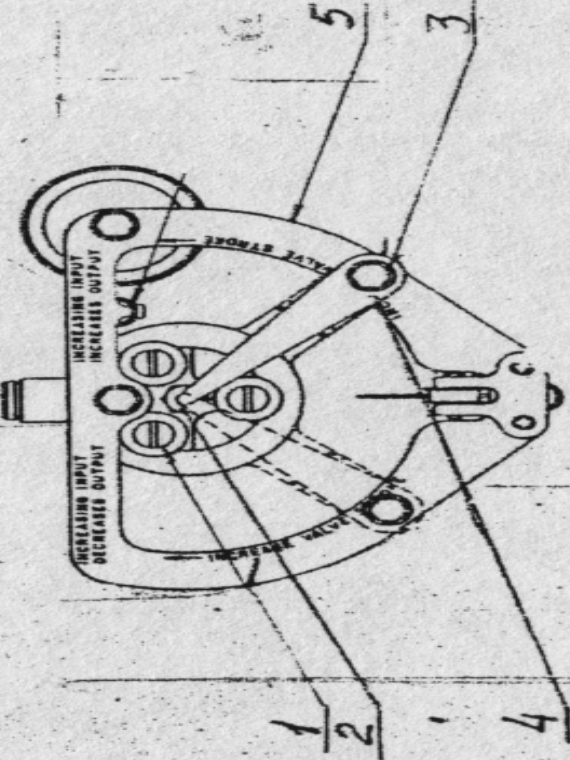
4.2. Особенности наладки позиционера на исполнительном механизме (Рис. 4).
Наладка позиционера типа "Фишер" на исполнительном механизме состоит из нескольких операции.
1)Ослабить три винта (1)не отворачивая их.2) Подать соответствующие давление питания на позиционер установить командный сигнал равный начальному значение -0,2 кгс./см2.
Поворотом гайки сопла(2)в соответствующую сторону добиться такого положения регулирующего клапана, чтобы он был полностью закрыт, но при незначительном увеличении командного сигнала - начал открываться.
Если поворотом гайки сопла не удается получить закрытого положения регулирующего клапана, то этого можно добиться поворотом винта заслонки (3), который является органом грубой настройки нуля позиционера.
3)Установить командный сигнал равным конечному значению -1,0 кгс/см2. Перемещением заслонки (4) вдоль коромысла (5) в соответствующую сторону добиться полного открытия регулирующего клапана.
 |
4)Операции, изложенные в пунктах 2 и 3, повторить до тех пор пока не будут получены точные результаты.
5) Последовательно устанавливая любые промежуточные значения входных сигналов, отмечать каждый раз степень открытия регулирующего клапана. Контроль по механическому указателя.
6) При получении линейной зависимости степени открытия регулирующего клапана от входного сигнала позиционер считается настроенным.
5 АСР уровня а сепараторах
5.1. Назначение и принцип действия АСР уровня (Рис 5).
Автоматическая система регулирования уровня в сепараторах предназначена для автоматического поддержания уровня конденсата в сепараторах в заданном диапазоне.
Поддержание заданного уровня в сепараторах необходимо для улучшения прохождения процесса разделения пара и конденсата, а также для нормальной работа откачивающих конденсатных насосов. При отклонении уровня в сепараторе в какую-либо сторону датчик типа ДС-П(1).выдает пневматический сигнал, пропорциональный этому отклонению. Этот сигнал поступает 1 позиционер "Фишер" исполнительного механизма (3).Усиленный по мощности, выходной сигнал позиционера поступает в мембранную камеру исполнительного механизма, перемещая шток регулирующего клапана(4) на такую величину, пока уровень в сепараторе не прекратит дальнейшее нарастание или убытие .
Для исключения случаев полного опорожнения сепараторов(5) от конденсата зона регулирования уровня в них по сигналам датчика находится в пределах 0,2-0,6 кгс/см2. Позиционер разогнан таким образом, чтобы при выходном сигнале датчика равным 0,2 кгс/см2, регулирующий орган был полностью открыт (уровень в сепараторе -максимальный).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.