Санкт-Петербургский государственный технологический университет растительных полимеров
Кафедра АХТП
КУРСОВОЕ ПРОЕКТИРОВАНИЕ
По дисциплине:
«Теория автоматического управления»
14 вариант
Выполнил: Проверил:
Студентка 536 группы Доцент, к.т.н.
Санкт-Петербург
Часть 1.
Измерение концентрации волокнистой суспензии.
Бумажная масса представляет собой водную суспензию волокнистых материалов. Основной ее характеристикой является концентрация, т.е. содержание в ней абсолютно сухого волокна в массовых процентах.
Можно выделить следующие диапазоны применяемых концентраций, %:
1. размол сгущенной массы при производстве древесной массы из щепы в современных размалывающих установках (15-30),
2. обычные непрерывные методы размола (3-12),
3. процессы дозирования и составления композиции (2-3,5),
4. процессы сортирования и подачи массы на плоскосеточные и круглосеточные машины, осветление оборотных вод (0,04-1,5),
5. очистка оборотных и сточных вод (0,003-0,15).
Т.о. в различных технологических процессах приходится контролировать концентрации от 0,04 до 30,%
Как известно, непосредственно измерить концентрацию, т.е. содержание абсолютно сухого волокна в единице объема возможно только в лабораторных условиях. Измерение концентрации проб массы производят путем их фильтрации, сушки и взвешивания. Для непрерывного измерения концентрации применяют датчики, принцип действия которых основан на косвенных методах измерения. Все эти методы имеют существенное ограничения по пределам измерения концентрации. Применение косвенных методов с дополнительными погрешностями измерений из-за влияния различных побочных факторов:
· Температуры;
· Давления;
· Скорости потока;
· Степени помола.
Часть 2.
Алгоритмическая структура системы управления.
Изобразим вначале принципиальную схему (рис.1) и структурную схему (рис.2) системы управления.
Рис.1
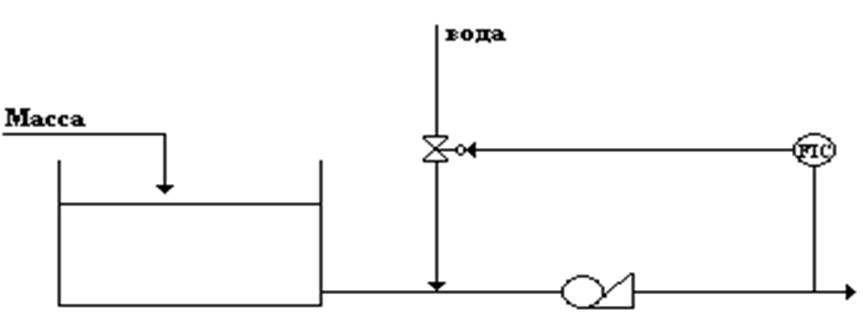
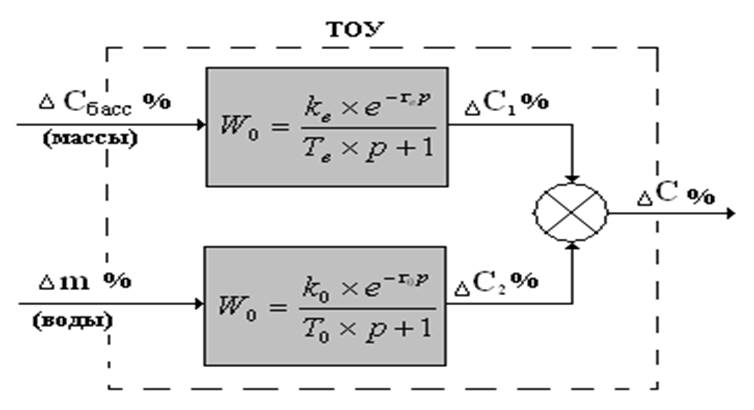
Рис.2
В состав данной АСР входят следующие элементы:
1. Технологический объект управления (ТОУ)
В нашем случае – это трубопровод, в котором регулируется концентрация бумажной массы. Регулирование производится путем изменения давления воздуха в камере исполнительного механизма – это управляющее воздействие. Возмущающим воздействием является изменение концентрации массы, поступающей в машинный бассейн.
Рис.3 Модель объект регулирования:
![]() p – изменение давления
воздуха в камере исполнительного механизма (МПа).
p – изменение давления
воздуха в камере исполнительного механизма (МПа).
![]() См – изменение
концентрации массы, поступающей в машинный бассейн (%).
См – изменение
концентрации массы, поступающей в машинный бассейн (%).
![]() С – изменение
концентрации после смесительного бассейна (%).
С – изменение
концентрации после смесительного бассейна (%).
2. Датчик.
В качестве датчика в данном случае используется концентратомер бумажной массы. Поскольку изменение концентрации должно производиться в напорном трубопроводе, то возможно использование датчика обтекания, например, его отечественной модификации – ДКБП-70.На структурной схеме датчик никак не отображается, поскольку он встроен в ТОУ, т.е. находится непосредственно внутри трубопровода.
3. Регулятор (входит с состав УВК).
В нашем случае используется дискретный ПИ – регулятор, реализующий соответствующий закон управления.
Его дискетная передаточная функция имеет вид:
 , где
, где
![]() настойки регулятора, подлежащие
выбору.
настойки регулятора, подлежащие
выбору.
4. Формирующий элемент (ФЭ).
Его передаточная функция имеет вид:
 , что
соответствует фиксатору (экстраполятору) нулевого порядка. Назначение ФЭ
состоит в том, чтобы преобразовать идеальные мгновенные импульсы, поступающие с
регулятора, в импульсы необходимой длительности и амплитуды.
, что
соответствует фиксатору (экстраполятору) нулевого порядка. Назначение ФЭ
состоит в том, чтобы преобразовать идеальные мгновенные импульсы, поступающие с
регулятора, в импульсы необходимой длительности и амплитуды.
5. Исполнительное устройство (ИУ).
Представляет собой совокупность исполнительного механизма (ИМ) и регулирующего органа (РО). Исполнительным механизмом может быть какой – либо электродвигатель в сочетании с редуктором; регулирующий орган – это задвижка канала. На структурной схеме ИУ никак не обозначено, однако его передаточная функция (так же, как и передаточная функция датчика) вошла в состав объекта управления и формирующего элемента.
Принцип действия состоит в следующем:
Вначале системе дается задание: Изменить концентрацию массы на некоторую величину (Сзад)[%].+
Из этой величины (Сзад) вычитается сигнал с датчика (С=ΔС1+ΔС2 - см. рис.) и на основании этой разности [рассогласование e(t)]. На регуляторе формируется управляющее воздействие [U(t)]. Это воздействие подается на исполнительное устройство, которое изменяет расход оборотной воды, тем самым, регулируя концентрацию массы.
Очевидно, что если ΔС1 = 0 (концентрация массы на входе в бассейн не меняется), то возмущение отсутствует, и ошибка регулирования равна нулю.
Часть 3.
1. Обратимся к рис.3:
Входные воздействия:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.