 (11.1)
(11.1)
где Т - передаваемый вращающий момент;
d - диаметр вала в месте установки шпонки;
h - высота шпонки;
t1 - глубина шпоночного паза на валу;
lр - рабочая длина шпонки, для шпонок со скругленными торцами lр = l - b ( b - ширина шпонки);
[![]() см
] - допускаемое напряжение смятия; при стальной ступице
см
] - допускаемое напряжение смятия; при стальной ступице
[![]() см
] = 100 МПа.
см
] = 100 МПа.
Расчет шпоночного соединения первого вала вибратора со шкивом.
Диаметр вала d = 70 мм, вращающий момент Т = 261,3•103 Н•мм.
По ГОСТ 23360-78 подбираем призматическую шпонку с размерами сечения: b = 20 мм, h = 12 мм, t1 = 7,5 мм. Длину шпонки принимаем из стандартного ряда l = 95 мм. Тогда lр = 95 - 20 = 75 мм.
Напряжения смятия
![]() см
= 2 • 261,3•103 / [ 70 • (12 – 7,5) • 75 ] = 22,1 МПа.
см
= 2 • 261,3•103 / [ 70 • (12 – 7,5) • 75 ] = 22,1 МПа.
Условие прочности шпонки 20 х 12 х 95 выполняется
![]()
Рис.9. Соединение с призматической шпонкой
2.7. Подбор подшипников.
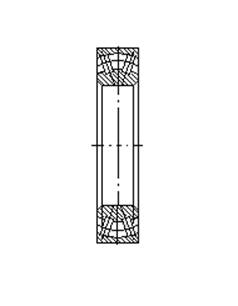
Рис. 10. Роликовый радиальный двухрядный сферический подшипник.
Выбираем по ГОСТ 22428-90 роликовые радиальные двухрядные сферические подшипники с параметрами: d=110 мм D=200 мм, В=53 мм. Подшипник 3522 ГОСТ 5721-75.
Эквивалентная динамическая нагрузка Р
Р=(ХVF)К![]() К
К![]() =483*1*1*1,2*1=580 Н
=483*1*1*1,2*1=580 Н
Где V=1-коэфициент вращения;
Х=1-коэфициент радиальной нагрузки;
F=483 Н - радиальная нагрузка;
К![]() =1,2 – коэффициент
учитывающий динамичность внешней нагрузки;
=1,2 – коэффициент
учитывающий динамичность внешней нагрузки;
К![]() =1-коэфициент,
учитывающий влияние температуры подшипникового узла.[1, 353]
=1-коэфициент,
учитывающий влияние температуры подшипникового узла.[1, 353]
Номинальная долговечность подшипника в миллионах оборотов

где Р=3-степеной показатель
С=108 кН – динамическая грузоподъёмность.
 =6,46 млн.
об.
=6,46 млн.
об.
долговечность подшипника в часах

Расчётная динамическая радиальная грузоподъёмность
 Н
Н
Пригодность ранее выбранного подшипника следует из условия
![]() , Н;
, Н;
![]() Н.
Н.
2.8. Расчет амортизаторов.
В большинстве вибрационных машин амортизаторы находятся под действием установившихся знакопеременных нагрузок, за исключением моментов пуска и остановки машины, когда вследствие перехода через резонанс амплитуда деформации амортизаторов может значительно превосходить амплитуды стационарных процессов.
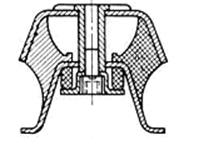
Рис.11 Резинометаллический амортизатор.
Детали такого типа широко используют в качестве элементов рессорной подвески тележек подвижного состава, амортизации железнодорожных мостов, виброизоляции горно-шахтного и металлургического оборудования и т.д.
Отношение площади основания детали, соприкасающейся со сжимающими поверхностями, к площади ее боковой поверхности называется фактором формы Ф.
 [стр.98,
10 ]
[стр.98,
10 ]
Для резинометаллических деталей фактор формы Ф=1,0 ÷ 1,25. [стр.99,10 ]
Зададимся высотой h и найдем остальные геометрические размеры резиновой втулки. Пуст h=8 см.


![]()
d=75 мм.
D=75+32=107 мм.
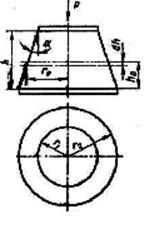
Рис.12 Схема к расчету резинометаллических деталей типа усеченного конуса.
Если резиновый элемент представляет собой усеченный конус (рис.12), нагруженный осевой силой Р, то напряжение сжатия будет переменной величиной, достигающей максимального значения у меньшего основания с радиусом r1 и минимального – у большего основания с радиусом r2. Напряжение в некотором промежуточном сечении с радиусом r0 составит
 [стр.104, 10 ]
[стр.104, 10 ]
![]() [табл.3, стр.53,10]
[табл.3, стр.53,10]
r1=d/2=75/2=37,5 мм. – радиус меньшего основания;
r2=D/2=107/2=53,5 мм. – радиус большего основания;
h0=40мм.
![]()
![]() - наружная осевая сила;
- наружная осевая сила;
где ![]() - масса двигателя;
- масса двигателя;
![]() - ускорение свободного падения;
- ускорение свободного падения;
![]() - коэффициент динамичности.
- коэффициент динамичности.
![]()
 , т.к. амортизатора два.
, т.к. амортизатора два.

Полная осадка Δ конического элемента высотой h составит
 , [стр.104,
10 ]
, [стр.104,
10 ]
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.