р3 - число трехподвижных пар, р4 – число четырехподвижных пар,
p5 – число пятипожвижных пар.
Механизмы, траектория точек звеньев которых, расположены в одной или параллельных плоскостях называются плоскими. В техники такие механизмы нашли наиболее широкое применение.
На плоскости свободное тело (звено) имеет три степени, свободы, соответственно n свободных звеньев - 3 n степеней свободы. Если конструировать плоскую кинематическую цепь из n звеньев с числом одноподвижных пар р1 и двухподвижных р2, то общее число условий связи S = 2 p1 + p2 , поскольку одна одноподвижная пара при плоском движении наложит два условия связи, а двухподвижная - одну.
![]() (Формула Чебышева).
(Формула Чебышева).
Можно доказать, что в плоском механизме одноподвижные
кинематический пары являются низшими, а двухподвижные - высшими.
Тогда формула Чебышева примет вид: ![]() ,
,
где рН и рВ - соответственно число пар низших и высших.
В состав плоского механизма не могут входить трех-, четырех- и пятиподвижные пары, поскольку движение каждого звена ограничено в этом случае наложением трех общих условий связи.
1.5. Строение плоских механизмов по Л. В. АССУРУ
Профессор Л. В. Ассур в 1914-1918 гг. сформулировал принципы создания и исследования плоских рычажных механизмов с низшими парами.
 Основная идея Л.В. Ассура состоит в
том, что любой плоский механизм может быть создан путем присоединения к
начальному звену (или начальным звеньям) и стойке кинематических цепей нулевой
подвижности, называемых структурными группами (группами Ассура).
Основная идея Л.В. Ассура состоит в
том, что любой плоский механизм может быть создан путем присоединения к
начальному звену (или начальным звеньям) и стойке кинематических цепей нулевой
подвижности, называемых структурными группами (группами Ассура).
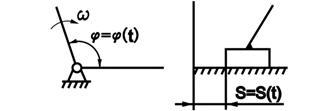
По классификации И. И Артобо-левского начальное звено и стойка, образующие одноподвижную кинематическую, являются механизмом 1-ого класса (рис. 1.4).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.