1.4. Примеры четырехзвенных плоских механизмов
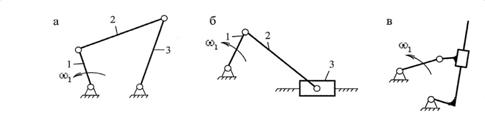
В технике получили наибольшее значение распространенные четырехзвенные плоские рычажные механизмы: шарнирный четырехзвенник (рис. 1.3, а), кривошипно-ползунный (рис. 1.3, б) и кулисный (рис. 1.3, в).
|
В зависимости от характера движения звенья принято называть следующим образом: кривошип – звено, образующее вращательную пару со стойкой и совершающее полный оборот вокруг оси этой пары; коромысло образует вращательную пару со стойкой, но не совершает полного оборота вокруг оси; шатун – звено, которое совершает сложное движение в пространстве и образует кинематические пары только с подвижным звеньями; ползун – образует поступательную пару со стойкой и движется прямолинейно; кулиса – звено, вращающееся вокруг неподвижной оси и образующие с другим звеном поступательную пару.
В теоретической механике обобщенными координатами механической системы называют независимые параметры, однозначно определяющие положение системы. Как уже было отмечено, под обобщенной координатой механизма будем понимать каждую из независимых между собой координат, определяющих положение всех звеньев механизма относительно стойки.
Число степеней свободы механизма число его обобщенных координат
Для определения числа степеней свободы механизма (W) в зависимости от его строения служат структурные формулы. В общем случае для пространственного механизма (структурная формула Сомова–Малышева):
![]() , где
, где
n - число подвижных звеньев, S - число условий связи,
p1 - число одноподвижных пар, р2- число двухподвижных пар,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.