Учитывая, что щековая (демпферная) обмотка является вспомогательной и кроме того, в явнополюсной машине влияние пусковой обмотки по оси d проявляется сильнее, чем по оси q, в приведенных выражениях для взаимных индуктивностей МAв,M>МAd,M>МAq,M.
Изложенное позволяет записать потокосцепления для фаз статора следующим образом:
y1А=L1i1A+M1iвCosg+M2iэdCosg+M3iэqSing,
y1B=L1i1B+M1iвCos(g-2p/3)+M2iэdCos(g-2p/3)+M3iэqSin(g-2p/3),
y1C=L1i1C+M1iвCos(g+2p/3)+M2iэdCos(g+2p/3)+M3iэqSin(g+2p/3).
Здесь с целью упрощения записи приняты следующие обозначения:
М1=МAв,M, М2=МAd,M, М3=МAq,M.
Переходя к результирующим векторам, полученные выражения можно записать в следующем виде:
![]()
Тогда
с учетом того, что ![]() , получим:
, получим:
![]() ,
(3.4)
,
(3.4)
![]() .
.
Потокосцепление обмотки возбуждения создается током возбуждения iв, током iэd в продольном эквивалентном короткозамкнутом контуре и влиянием токов статора i1A,i1B, i1C :
![]() (3.5)
(3.5)
Здесь
![]() – взаимные индуктивности
между обмотками статора,
– взаимные индуктивности
между обмотками статора, ![]() -
взаимная индуктивность между обмоткой возбуждения и продольным эквивалентным
контуром.
-
взаимная индуктивность между обмоткой возбуждения и продольным эквивалентным
контуром.
Так как МАв=МвА, МВв=МвВ, МСв=МвС, то с учетом принятого выше обозначения МАв,М=М1, получим:
МвА=М1Соsg, МвВ=М1Соs(g-2p/3), МвС=М1Соs(g+2p/3).
После подстановки значений взаимных индуктивностей в (3.5) получим:
 .
.
Так
как ![]() , то выражение в квадратных
скобках представляет собой (см. п. 2.4) увеличенный в 1,5 раза результирующий
вектор тока статора
, то выражение в квадратных
скобках представляет собой (см. п. 2.4) увеличенный в 1,5 раза результирующий
вектор тока статора ![]() . Так как
потокосцепление yв направлено по оси d, то квадратных скобках должна быть проекция вектора
. Так как
потокосцепление yв направлено по оси d, то квадратных скобках должна быть проекция вектора ![]() на ось d. Следовательно,
на ось d. Следовательно,
 .
(3.6)
.
(3.6)
Потокосцепление пусковой (демпферной) обмотки по оси d создается влиянием токов статора i1A, i1B, i1C, током возбуждения i1в и током iэd в эквивалентном короткозамкнутом контуре, магнитная ось которого направлена по оси d:
![]()
Здесь ![]() –
взаимные индуктивности между продольным эквивалентным контуром и обмотками
статора; - эквивалентная индуктивноость короткозамкнутого контура.
–
взаимные индуктивности между продольным эквивалентным контуром и обмотками
статора; - эквивалентная индуктивноость короткозамкнутого контура.
Так как МdА=МАd, МdВ=МВd, МdС=МСd, то согласно описанному выше МdА=М1Соsg, МdВ=М1Соs(g-2p/3), МdС=М1Соs(g+2p/3). Следовательно,

 (3.7)
(3.7)
В создании потокосцепления по оси q обмотка возбуждения не участвует. Поэтому
 (3.8)
(3.8)
С учетом принятого допущения об отсутствии насыщения магнитной системы двигателя все индуктивности по осям d и q постоянны.
3.8 Электромагнитный момент.
Развиваемый
двигателем электромагнитный момент удобнее всего определять по паре
результирующих векторов ![]() Тогда согласно (2.30)
Тогда согласно (2.30)
(3.9)
3.9 Структурная схема явнополюсного двигателя с электромагнитным возбуждением.
Объединяя выражения, описывающие частные процессы, протекающие в различных элементах синхронного двигателя, получим следующую систему уравнений:
![]()
 (3.10)
(3.10)
![]()
![]()

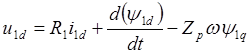
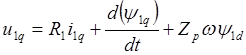
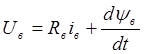
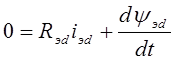
Подставив в первые пять уравнений выражения для потокосцеплений, получим преобразованную систему уравнений:
![]()



 (3.11)
(3.11)
![]()
![]()
Системе уравнений (3.11) соответствует структурная схема, приведенная на рис. 3.2.
|
|||
3.10 Особенности структурной схемы неявнополюсной машины с электромагнитным возбуждением.
Неявнополюсные синхронные машины имеют массивный ротор и обычно лишены пусковой (демпферной) обмотки [5], роль которой выполняет тело ротора. Действие массивного ротора можно заменить действием эквивалентной (демпферной) обмотки. При этом параметры этой обмотки по осям d и q одинаковы, но изменяются в широких пределах из-за поверхностного эффекта.
3.11 Структурная схема двигателя с электромагнитным возбуждением, не имеющего пусковой обмотки.
При отсутствии пусковой (демпферной) обмотки iэd=iэq=yэd=yэq=0 и система уравнений (3.10) упрощается:
![]()
(3.12)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.