





5 УПРАВЛІННЯ В’ЇЗДОМ НА АВТОМОБІЛЬНУ ДОРОГУ
5.1 Обґрунтування організації світлофорного в’їзду на автомобільну дорогу
Згідно проведеного аналізу аварійності (див. перший розділ) було визначено, що значні інтенсивності руху спостерігаються на перетинанні з дорогою на Коломак (395км+360м). Враховуючи значення інтенсивностей по основній дорозі – 7380 авт/доб (738 авт/год) і по другорядній дорозі: 920 авт/доб (92 авт/год) слід розглянути організацію світлофорного регулювання на даному перетинанні.
Для введення світлофорного регулювання існує декілька умов [16, 17]. Спираючись на ці умови, можливо зробити наступний висновок: на перетинанні дороги Київ-Харків-Довжанський з дорогою на Коломак виконується перша умова введення світлофорного регулювання, а саме спостерігаються конфліктні транспортні потоки по головній і другорядній дорозі.
5.2 Організація світлофорного регулювання
Для організації руху транспортних засобів на перетинанні пропонується заборонити лівий поворот з боку дороги на Коломак (в напрямку Харків) і залиши правий поворот (в напрямку Київ). При цьому перетинання дороги і лівоповоротній рух регулюються завдяки “винесеного перехрестя” [18] і виділення спеціальної смуги на дорозі для здійснення послідуючого маневру. Це дозволить знизити кількість конфліктних крапок на перетинанні.
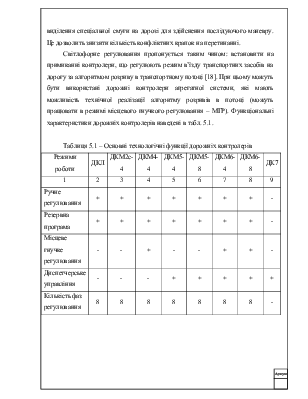
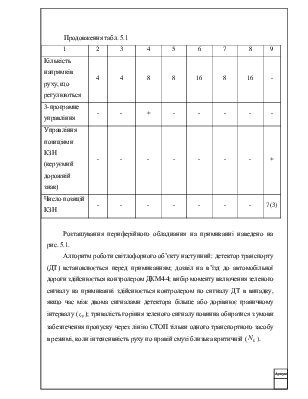
Світлофорне регулювання пропонується таким чином: встановити на примиканні контролери, що регулюють режим в’їзду транспортних засобів на дорогу за алгоритмом розриву в транспортному потоці [18]. При цьому можуть бути використані дорожні контролери агрегатної системи, які мають можливість технічної реалізації алгоритму розривів в потоці (можуть працювати в режимі місцевого гнучкого регулювання – МГР). Функціональні характеристики дорожніх контролерів наведені в табл. 5.1.
Таблиця 5.1 – Основні технологічні функції дорожніх контролерів
|
Режими роботи |
ДКЛ |
ДКМ2с-4 |
ДКМ4-4 |
ДКМ5-4 |
ДКМ5-8 |
ДКМ6-4 |
ДКМ6-8 |
ДК7 |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Ручне регулювання |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
- |
|
Резервна програма |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
- |
|
Місцеве гнучке регулювання |
- |
- |
+ |
- |
- |
+ |
+ |
- |
|
Диспетчерське управління |
- |
- |
- |
+ |
+ |
+ |
+ |
+ |
|
Кількість фаз регулювання |
8 |
8 |
8 |
8 |
8 |
8 |
8 |
- |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Кількість напрямків руху, що регулюються |
4 |
4 |
8 |
8 |
16 |
8 |
16 |
- |
|
3-програмне управління |
- |
- |
+ |
- |
- |
- |
- |
- |
|
Управління позиціями КЗН (керуємий дорожній знак) |
- |
- |
- |
- |
- |
- |
- |
+ |
|
Число позицій КЗН |
- |
- |
- |
- |
- |
- |
- |
7(3) |
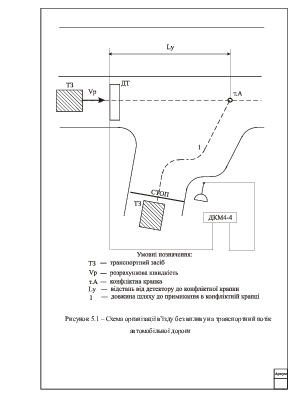
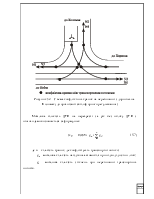
Розташування периферійного обладнання на примиканні наведено на рис. 5.1.
Алгоритм роботи світлофорного об’єкту
наступний: детектор транспорту (ДТ) встановлюється перед примиканням; дозвіл на
в’їзд до автомобільної дороги здійснюється контролером ДКМ4-4; вибір моменту
включення зеленого сигналу на примиканні здійснюється контролером по сигналу ДТ
в випадку, якщо час між двома сигналами детектора більше або дорівнює
граничному інтервалу (![]() ); тривалість горіння
зеленого сигналу повинна обиратися з умови забезпечення пропуску через лінію
СТОП тільки одного транспортного засобу в режимі, коли інтенсивність руху по
правій смузі близька критичній (
); тривалість горіння
зеленого сигналу повинна обиратися з умови забезпечення пропуску через лінію
СТОП тільки одного транспортного засобу в режимі, коли інтенсивність руху по
правій смузі близька критичній (![]() ).
).
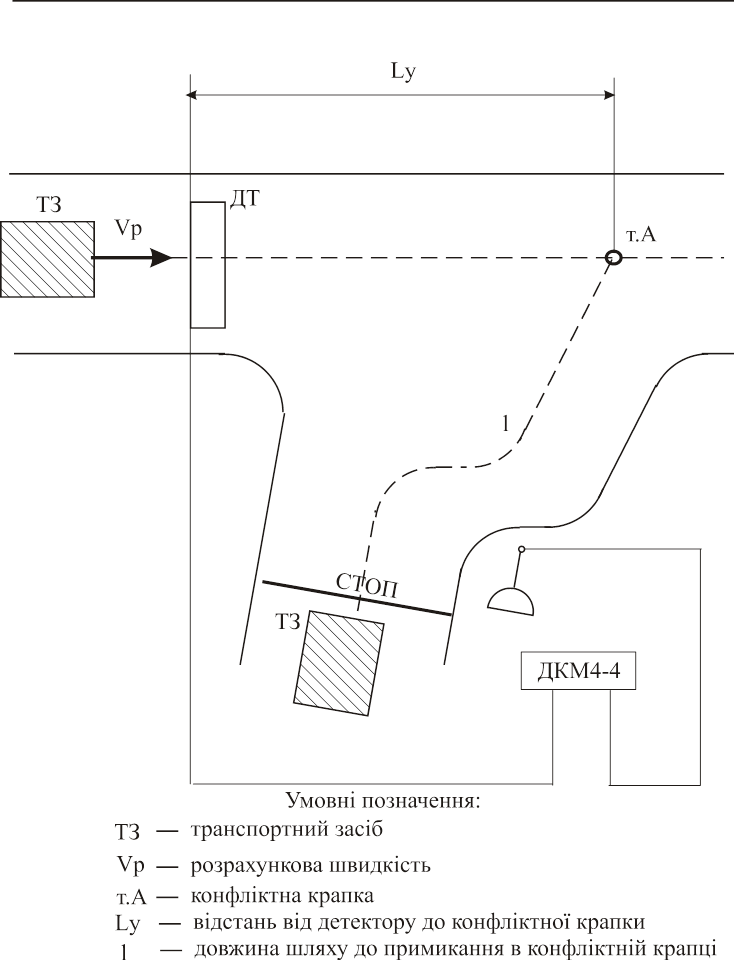
Рисунок 5.1 – Схема організації в’їзду без впливу на транспортний потік автомобільної дороги
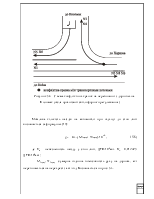
При зменшенні інтенсивності до ![]() тривалість зеленого сигналу на
примиканні може бути збільшена вдвічі для дозволу одночасового в’їзду двох
транспортних засобів, що послідовно перетинають лінію СТОП.
тривалість зеленого сигналу на
примиканні може бути збільшена вдвічі для дозволу одночасового в’їзду двох
транспортних засобів, що послідовно перетинають лінію СТОП.
Для забезпечення безпеки входження транспортного засобу з примикання в основний потік вагоме значення має місце встановлення ДТ відносно крапки конфлікту (конфліктна крапка А – див. рис. 5.1).
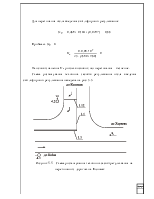
Для визначення відстані від розташування ДТ
до конфліктної крапки розглянемо (![]() ) більш
детально процес руху транспортного засобу від лінії СТОП до крапки А.
) більш
детально процес руху транспортного засобу від лінії СТОП до крапки А.
В процесі руху транспортного засобу
використовуються дві фази руху: рівноприскорений руху від ![]() до
до ![]() і
далі рівномірний руху зі швидкістю
і
далі рівномірний руху зі швидкістю ![]() до крапки
входження в потік (крапка А). Відповідно до цього час руху транспортного засобу
на примиканні визначається за формулою [18]:
до крапки
входження в потік (крапка А). Відповідно до цього час руху транспортного засобу
на примиканні визначається за формулою [18]:
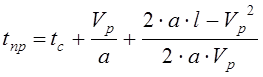 ,
(5.1)
,
(5.1)
де ![]() -
час запізнення початку руху після включення зеленого сигналу, с. Приймаю
-
час запізнення початку руху після включення зеленого сигналу, с. Приймаю ![]() [18];
[18];
![]() - прискорення руху
транспортного засобу, м/с2. Знаходиться в діапазоні
- прискорення руху
транспортного засобу, м/с2. Знаходиться в діапазоні ![]() [18]. Приймаю
[18]. Приймаю ![]() ;
;
![]() - рекомендована
швидкість руху, м/с. Приймаю
- рекомендована
швидкість руху, м/с. Приймаю ![]() ;
;
![]() - відстань від
лінії СТОП до крапки А (перехідно-швидкісна смуга), м. Визначається за
формулою:
- відстань від
лінії СТОП до крапки А (перехідно-швидкісна смуга), м. Визначається за
формулою:
![]() ,
(5.2)
,
(5.2)
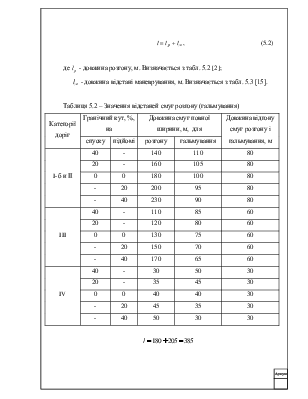
де ![]() -
довжина розгону, м. Визначається з табл. 5.2 [2];
-
довжина розгону, м. Визначається з табл. 5.2 [2];
![]() - довжина відстані
маневрування, м. Визначається з табл. 5.3 [15].
- довжина відстані
маневрування, м. Визначається з табл. 5.3 [15].
Таблиця 5.2 – Значення відстаней смуг розгону (гальмування)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.