Построение такой системы требует теоретического обоснования, это обоснование дал Вишнеградский 1795 году.
![]() Он
показал, что существует область устойчивости в работе данной машины.
Он
показал, что существует область устойчивости в работе данной машины.
|
 |
|
|
|
2 Математическое описание линейных систем
автоматического управления
Далее рассмотрим математическое описание линейных систем автоматического управления – построение математических моделей элементов и звеньев, обладающих свойством линейности
2.1 Линейные звенья автоматических систем
Будем считать, что все звенья описываются дифференциальным уравнением.
Обычно дифференциальные уравнения системы записываются в таком виде, что значения регулируемой величины и ее производных располагаются в левой части уравнения. Значения входных воздействий (управляющих и возмущающих) и их производных располагаются в правой части.
Представим звено следующим образом:
 |
Тогда полное дифференциальное уравнение будет иметь следующий вид:
![]()
 (*)
(*)
Пример
Редуктор – механизм из нескольких зубчатых колес для передачи вращения от одного вала к другому.
Дадим математическое описание редуктора как элемента автоматической системы.
![]() ω1(t)
ω1(t) ![]() ω2(t)
ω2(t)
|
=>
=>
Пример математического описания элемента системы.
Рассмотрим следующую электрическую цепь
|
|
|

![]()
|
a1=RС
a0=1
b0=1
 Это
уравнение описывает инерционное звено первого порядка (апериодическое)
Это
уравнение описывает инерционное звено первого порядка (апериодическое)
|
|
Линейными называются звенья, обладающие следующим свойством:
Пусть реакция на сигнал X1(t) выглядит, как Y1(t), а сигналу X2 соответствует
сигнал Y2
![]() X=X1(t) Y=Y1(t)
X=X1(t) Y=Y1(t)
X=X2(t) Y=Y2(t)
X=X1(t)+X2(t) может быть найдена, как Y=Y1(t)+Y2(t)
Докажем, что звено (редуктор) является линейным:
X1=2 Y1=4
X2=3 Y2=6
X3=X1+X2 =5 Y3=Y1+Y2 =10
Можно показать, что звенья, описываемые уравнением (*) обладают свойством линейности, если коэффициенты a1,…,an=const и b1,….,bn =const
2.2 Типовые сигналы систем автоматического направления.
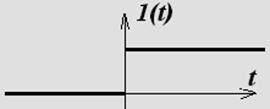
I. Единичный ступенчатый сигнал
Физически это сигнал замыкающего контакта (релейный сигнал)
X(t)=1(t)=
Это функция называется функцией Хевисайда.
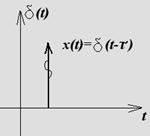
II Импульсная дельта функция (функция Дирака)
Будем называть d-функцией такую функцию, которая обладает следующими свойствами:
Дадим другое определение d - функции, как пределу последовательности приближений.
 Первое приближение.
Первое приближение.
δ
1=
 Второе
приближение.
Второе
приближение.
δ 2=
 Приближение п - порядка
Приближение п - порядка
δ n=
Площадь графиков каждого приближения постоянна и равна 1.
![]() называется
предел последовательности прямоугольных импульсов, которые строятся по
следующему правилу:
называется
предел последовательности прямоугольных импульсов, которые строятся по
следующему правилу:
IIIЛинейно изменяющийся сигнал
 |
X(t=)
 IVПараболический сигнал
IVПараболический сигнал
![]() x(t)=
x(t)=
Применяется в задачах исследования точности автоматических систем.
VГармонический(синусоидальный сигнал) сигнал
 |
Описывает соотношение:
X(t)=asin(wt+j)
a-амплитуда
j- начальная фаза
Т – период.(время, через которое
значение функции повторяется)
¦=1/T - циклическая частота (число периодов в секунду)
w = 2p*¦ - круговая (угловая) частота. Угловая частота показывает сколько периодов в радианной мере укладывается в единицу измерения.
X(t + T)=x(t)
ƒ=1/T
ω=2πƒ, где ω – угловая частота.
VIОбобщенный гармонический сигнал
Тоже синусоидальный сигнал, представленный в комплексной форме.
k=a+jb – алгебраическая форма записи комплексного числа, где
а - действительная составляющая
jb- мнимая составляющая
![]()
k =M(cosφ+jsinφ)-тригонометрическая форма записи комплексного числа
k=M*ejφ- показательная форма записи комплексного числа
![]() -длина вектора
-длина вектора
φ=arctgb/a
φ=ωt; ω=2π/T; b=M*cosφ=M*cosωt
М – длина вектора
b – действительная часть
|
 а – мнимая часть
а – мнимая часть
Формула Эйлера:
ejφ= cosφ+jsinφ
X1(t)-синусоидальный,X2(t)-синусоидальный, но с другой амплитудой.
X1=X1mcosωt
X2=X2mcos (ωt+ φ)
Представим входной сигнал в виде суммы двух комплексных чисел.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.