Robotics
;Many people perceive robots to be walking, talking androids or highly intelligent machines capable of carrying out all kinds of unusual deeds. These are the robots of science fiction and of modern-day movies rather than reality.
To clarify what is meant by a robot, since there is no uniformity by appearance, robot has been defined by the Robotics Institute of America as "... a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or'specialized devices through variable programmed motions for the performance of a variety of tasks." More simply put, they. are machines that can be programmed to do a variety of useful tasks.
While some experimental robots are made into human-like forms, most industrial robots resemble nothing of the sort, and it would be impractical to make them so. Far from being intelligent, robots are capable of completing only prepi'ogrammed instructions. But they can be programmed to do some rather complicated tasks; and they can turn out products in a factory with unsurpassed precision.
They are used in manufacturing mainly to reduce costs and to increase productivity. Robots are also excellent at repetitive tasks that humans find boring; they never tire. Robots are ideal to replace humans on many jobs that are hazardous, providing welcome relief from the possibility of injury.
The first industrial robots were simply computer-controlled mechanical arms, performing a single, simple task.f Today, industrial robots are still used for mainly assembly-line tasks, but some can do multiple tasks and move along on wheels or a track or belt system. Many robots have an elementary sense of touch and vision that gives them more precision.
Robots generally are delegated to three types of jobs: (a) operating tools; (b) lifting and handling materials or parts; and (c) assembling parts.
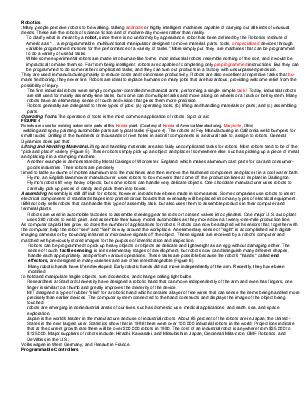
Operating Tools The operation of tools is the most common application of robots. Spot or arc
FIGURE 4
Robots are used for welding automobile parts at this Honda plant. (Courtesy of Honda of America Manufacturing, Marysville, Ohio)
welding and spray painting automobile parts are typical tasks (Figure 4). The robots at Fey Manufacturing in California weld bumpers for small trucks. Drilling of the hundreds or thousands of rivet holes in aircraft components is a natural task to, assign to robots. General Dynamics does just that.
Lifting and Handling Materials Lifting and handling materials are also fairly uncomplicated tasks for robots. Most robots tend to be of the "pick and place" variety (Figure 5). These robots simply pick up an object and place it somewhere else, such as picking up a piece of metal and placing it in a stamping machine.
Another example is demonstrated by Metal Casings of Worcester, England, which makes aluminum cast parts for car and consumer-goods industries. Their robots are precisely
timed to ladle a volume of molten aluminum into the machines and then remove the hardened component and place it in a cool water bath.
Flymo, an English lawnmower manufacturer, uses robots to box mowers that come off the production lines at its plant in Darlington. Flymo's robots lift very heavy objects; but some robots can handle very delicate objects. One chocolate manufacturer uses robots to carefully pick up pieces of candy and pack them into boxes.
Assembling Assembly is still difficult for robots; however, inroads have been made in some areas. Some companies use robots to insert electrical components of standard shapes into printed circuit boards that eventually will be placed into many types of electrical equipment. IBM not only sells robots that can handle this type of assembly task, but also uses them to assemble products in their computer and terminal plants.
Robots are used in automobile factories to assemble steering gear tie rods or to insert valves into cylinders. One major U.S. auto plant uses 260 robots to weld, paint, and assemble their luxury model automobiles as they move down a twenty-one-mile production line.
As computer capabilities grow, so does the number of applications for robots. Robots can now be adapted with sensors that, together with the computer, help the robot "see" and "feel" its way around the workplace. An elementary sense of "sight" is accomplished with digital-imaging cameras or by bouncing infrared or microwave signals off the object. These signals are received by a robot's computer and matched with previously stored images for the purpose of identification and inspection.
Robots can be programmed to pick up heavy objects or objects as delicate and lightweight as an egg without damaging either. The sense of touch, tactile sensing, is in its elementary stages of development, but robots now can distinguish many different shapes, handle each appropriately, and perform various operations. These tasks are possible because Ihe robot's "hands," called end effectors, are designed in many varieties and are often interchangeable (Figure 6).
Many robotic hands have b°en developed. Early robotic hands did not move independently of the arm. Recently, they have been modified
to hold and manipulate fragile objects, turn doorknobs, and change ceiling light bulbs.
Researchers at Stanford University have designed a robotic hand that can move independently of the arm and even has fingers; one finger is similar to a thumb and greatly improves the dexterity of the device.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.