При пуске выпрямителя с
нуля (![]() =0) или при переходе его в режим
прерывистых токов (
=0) или при переходе его в режим
прерывистых токов (![]() ) возможно нарушение
указанного выше условия. Поэтому на управляющие электроды тиристоров в
трёхфазной мостовой схеме необходимо подавать импульсы шириной более 60° или
два узких с интервалом между ними 60° (рис 3 б, при
) возможно нарушение
указанного выше условия. Поэтому на управляющие электроды тиристоров в
трёхфазной мостовой схеме необходимо подавать импульсы шириной более 60° или
два узких с интервалом между ними 60° (рис 3 б, при ![]() ).
).
Среднее значение
выпрямленного напряжения, когда ток ![]() прерывистый (
прерывистый (![]() ), определяется выражением
), определяется выражением
![]()
Отсюда следует, что
предельный угол регулирования, при котором ![]() =0,
является угол
=0,
является угол ![]() . Зависимость среднего
значения выпрямленного напряжения от угла α представляет собой регулировочную
характеристику преобразователя −
. Зависимость среднего
значения выпрямленного напряжения от угла α представляет собой регулировочную
характеристику преобразователя − ![]() . На рис. 3.4
представлены регулировочные характеристики построенные по выражениям.
. На рис. 3.4
представлены регулировочные характеристики построенные по выражениям.
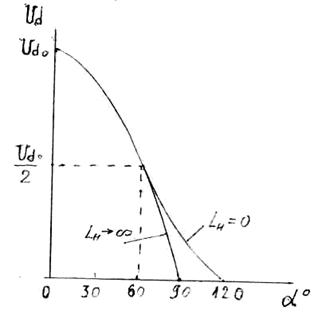
Рисунок 3.4 – Регулировочные характеристики трёхфазного мостового управляемого выпрямителя.
Из (3.1) и (3.2) следует,
что изменяя угол регулирования α путём изменения величины сигнала управления ![]() , подаваемого на вход СУ, можно
изменять величину выпрямленного напряжения, прикладываемого к якорю двигателя,
т.е. реализовать
, подаваемого на вход СУ, можно
изменять величину выпрямленного напряжения, прикладываемого к якорю двигателя,
т.е. реализовать
22
рассмотренный в разделе 1. способ регулирования скорости двигателя постоянного тока.
3.4 Защита тиристоров от перенапряжений
Все перенапряжения принято делить на два вида − внутренние и внешние. К внутренним относятся так называемые коммутационные перенапряжения, обусловленные процессами, происходящими в цепи тиристора при его закрывании.
Для защиты от внутренних перенапряжений применяют R1C1-цепочки, которые подключаются параллельно каждому тиристору.
Причинами внешних перенапряжений могут быть: включение и выключение первичной обмотки силового трансформатора на холостом ходу, атмосферные разряды, перегорание быстро действующих предохранителей и т.д. Наиболее опасными для тиристоров являются перенапряжения, вызванные включением выключением первичной обмотки ненагруженного трансформатора.
Для защиты тиристоров от внешних перенапряжений R2C2-цепочки подключают к вторичным обмоткам трансформатора.
Способы включения защитных RC-цепочек показаны на рис.3.5
23
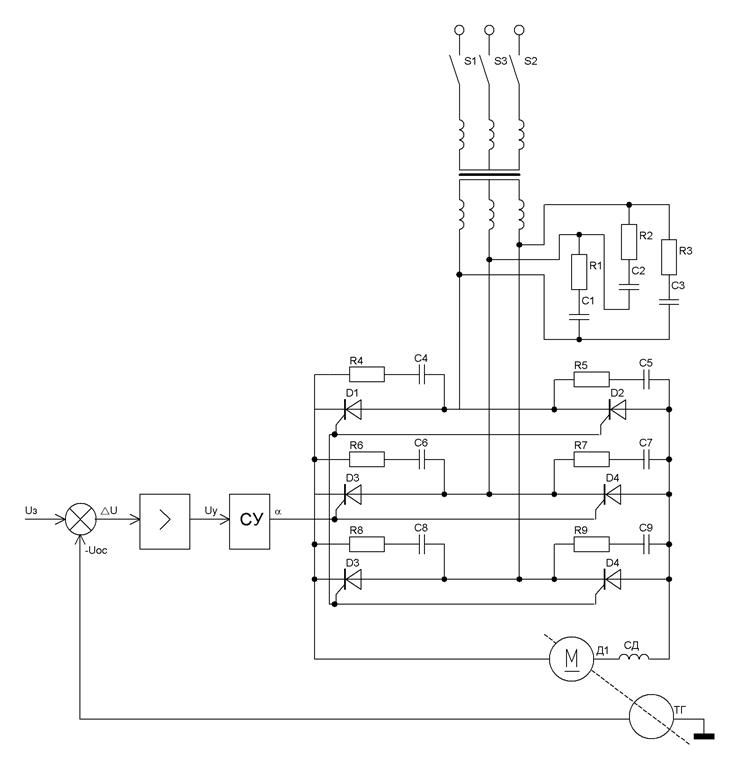
Рисунок 3.5 – Принципиальная схема электропривода с обратной связью по скорости
24
4 ВЫБОР МОЩНОСТИ ДВИГАТЕЛЯ
Выбор мощности двигателя на стадии проектирования осуществляется методами эквивалентных величин-метод эквивалентного тока, метод эквивалентного момента и метод эквивалентный мощности. Так как в задании нагрузочная диаграмма задана в виде зависимости М(t)(рис. 4.1), то выбор мощности будем производить по методу эквивалентного момента
Рисунок 4.1 – Нагрузочная диаграмма механизма
Эквивалентный момент определяется как

![]()
По заданной номинальной (максимальной) скорости механизма ωм находим эквивалентную мощность на валу механизма
25
![]()


![]()
![]()

С учетом заданного значения передаточного числа редуктора и его КПД определяем момент и мощность на валу двигателя и скорость вращения вала двигателя


![]()
![]()
![]()
По Мдв, Рдв, ωдв по каталогу выбираем двигатель постоянного тока. При этом необходимо выполнить условие
![]()
![]()
![]()
26
Выбираем двигатель: П – 62.
Uн=220 В, Рн=25 кВт, nн=3000 об/мин, nmax=3000 об/мин, Iн=128 А, Jд=0,16![]() , 2р=4, 2а=2, wя=93, Rд=Rя+ Rдоп=0,0464 Ом, масса = 187 кг.
, 2р=4, 2а=2, wя=93, Rд=Rя+ Rдоп=0,0464 Ом, масса = 187 кг.
Далее необходимо проверить выбранный двигатель по перегрузочной способности
![]()


![]()
 ;
; 
![]() ;
; 
![]()
где Ммах - максимальное значение момента механизма по перегрузочной диаграмме (Ммах=Мз),
Для обеспечения пуска двигателя под нагрузкой необходимо, чтобы
![]()
Для последующего исследования динамических свойств электропривода необходимо уметь определить суммарный момент индукции привода.
Каждая из вращающихся частей привода обладает соответствующими моментом индукции и скоростного вращения. Динамическое действие каждой из частей можно заменить действием одного суммарного момента индукции, приведенного, например, к валу двигателя. Приведение моментов индукции к одной оси вращения основано на том, что суммарный запас кинетической энергии движущихся частей привода, отнесенный к одной оси, остается неизменным. В таком случае можно записать:
27
 |
Рисунок 4.2 – Кинематическая схема связи двигателя с исполнительным механизмом
![]()
где ![]() - момент инерции двигателя
- момент инерции двигателя
![]() - момент инерции редуктора,
приведенный к валу двигателя
- момент инерции редуктора,
приведенный к валу двигателя
![]() - момент инерции механизма
- момент инерции механизма
 ;
;

28
5 РАСЧЕТ И ВЫБОР ЭЛЕМЕНТОВ ЭЛЕКТРОПРИВОДА
5.1 Расчет параметров трансформатора.
Предварительно находим параметры трансформатора.
Типовая (расчетная) мощность:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.