Известны два способа автоматического регулирования переменных системы: регулирование по отклонению координаты от заданного значения с помощью отрицательной обратной связи по регулируемой переменной и регулирование по возмущению.
На систему электропривода может воздействовать большое количество различных возмущений, для пресечения которых потребуется соответствующая измеритель-
17
ная аппаратура, что приводит к резкому усложнению системы, при этом в целом ряде случаев физически измерить возмущения не представляется возможным.
Поэтому в данной работе будет рассматриваться электропривод с регулированием по отклонению. В этом случае не имеет значения количество действующих на систему возмущений, место их воздействия − система устраняет следствие их воздействия, т.е. отклонение контролируемого параметра от заданного значения.
Согласно заданию необходимо обеспечить регулирование скорости вращения двигателя в заданном диапазоне и поддержание её с заданной точностью. Контролируемым параметром в этом случае является скорость и, следовательно, система электропривода реализуется с обратной связью по скорости.
Таким образом, в состав электропривода должны входить: двигатель постоянного тока с независимым возбуждением Д, преобразователь напряжения переменного тока в напряжение постоянного тока ТП, трансформатор Тр, согласующий параметры питающей сети с величиной напряжения, питающего якорь двигателя, датчик скорости ДС (тахогенератор), устройство формирования управляющих импульсов УФ, усилитель сигнала ошибки регулирования У, сумматор сигналов задания и фактического значения скорости. Функциональная схема электропривода представлена на рис. 3.1.
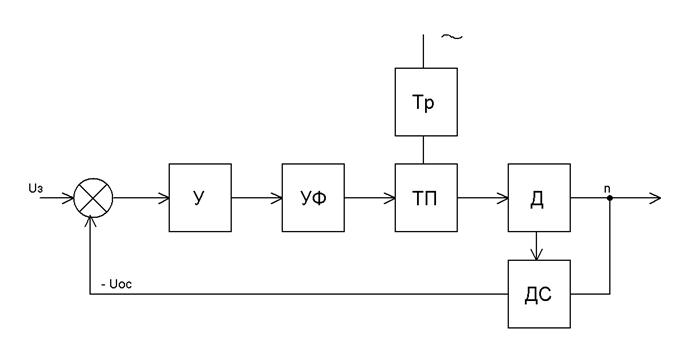
Рисунок 3.1 – Функциональная схема электропривода с обратной связью по скорости.
3.2 Обоснование схемы тиристорного преобразователя.
Принципиально, в зависимости от мощности двигателя, возможно применение двух схем тиристорных преобразователей: для маломощных двигателей
18
(0.5 ~ 3.0) кВт при небольшом диапазоне регулирования
скорости вращения
(10 ~ 45):1 − целесообразно применять однофазные схемы; для двигателей средней
и большой мощности − трёхфазные схемы.
Для наиболее полного использования двигателя по току на всех скоростях вращения, а также для возможности применения более дешевых вентилей невысокого класса тиристоры включают чаще всего по трёхфазной мостовой схеме. На рис. 3.2 представлена принципиальная схема трёхфазного мостового преобразователя.
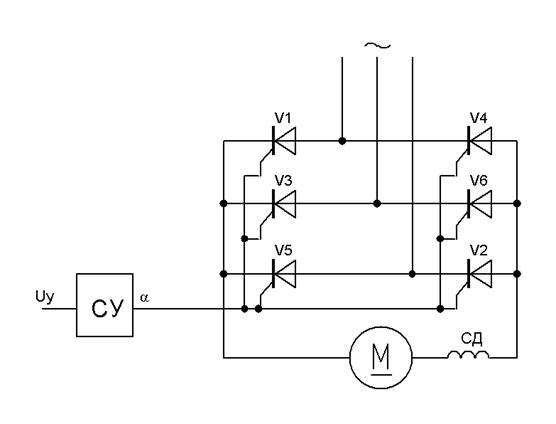
Рисунок 3.2 – Принципиальная схема трёхфазного мостового тиристорного преобразователя.
Применение трёхфазной мостовой схемы позволяет также:
– создать равномерную нагрузку на все три фазы сети;
– уменьшить пульсацию выпрямленного напряжения;
– уменьшить расчётную мощность трансформатора;
– повысить коэффициент мощности.
В цепь якоря двигателя должен включаться сглаживающий реактор (дроссель), который решает две основные задачи:
– обеспечивает непрерывность тока якоря двигателя в определённом диапазоне нагрузок и скоростей его вращения;
19
– ограничивает амплитуду переменной составляющей тока якоря двигателя до допустимой величины.
Кроме этого, сглаживающий реактор должен обеспечивать ограничение скорости нарастания аварийного тока через тиристоры при коротком замыкании на стороне постоянного тока (на рис.3.2 обозначен СД).
3.3 Принцип регулирования напряжения.
Изменение величины
напряжения прикладываемого к якорю двигателя достигается путём изменения
моментов отпирания тиристоров в функции управляющего сигнала ![]() , т.е. в состав тиристорного
преобразователя должна входить также система управления последним (рис 3.2). СУ
предназначена для генерирования и формирования импульсов управления
определённой длительности и формы, распределения их по соответствующим фазам и
изменения моментов подачи этих импульсов на управляющие электроды тиристоров.
, т.е. в состав тиристорного
преобразователя должна входить также система управления последним (рис 3.2). СУ
предназначена для генерирования и формирования импульсов управления
определённой длительности и формы, распределения их по соответствующим фазам и
изменения моментов подачи этих импульсов на управляющие электроды тиристоров.
В трёхфазной мостовой схеме одновременно должны работать два тиристора: один из катодной (нечётной) группы, другой из анодной (чётной) группы, и нагрузка в любой момент времени присоединяется к двум фазам вторичной обмотки трансформатора. Отпирающие импульсы на тиристоры не чётной группы подаются с опережением 180° по отношению к тиристорам чётной группы, присоединённым к тем же выводам вторичной обмотки, так как первые работают при положительных значениях фазных напряжений на анодах, вторые − при отрицательных на катодах.
Работу схемы выпрямления
проиллюстрируем, для простоты при работе на активную нагрузку, диаграммами:
мгновенные значения фазных напряжений на тиристорах (рис. 3 б); кривые выпрямленного
напряжения ![]() (рис. 3 в), которое получается путём
суммирования мгновенных значений напряжений работающих в данный момент времени
вентилей; кривые анодных токов (рис 3 г) катодной группы − над осью времени, анодной группы − под осью. Каждая из диаграмм построена для трёх углов
регулирования:
(рис. 3 в), которое получается путём
суммирования мгновенных значений напряжений работающих в данный момент времени
вентилей; кривые анодных токов (рис 3 г) катодной группы − над осью времени, анодной группы − под осью. Каждая из диаграмм построена для трёх углов
регулирования:![]() ,
, ![]() ,
,
![]() .
.
20
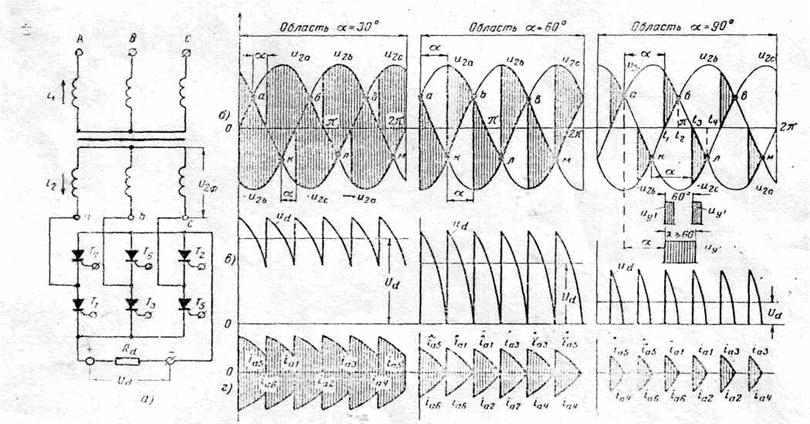
Рисунок 3.3 – Трёхфазная мостовая схема на управляемых вентилях. Кривые выпрямленного напряжения и анодных токов при работе на активную нагрузку.
При угле регулирования ![]() отпирающие импульсы на тиристоры
необходимо подавать в моменты, соответствующие точкам пересечения кривых фазных
напряжений (точки а, б, в и к, л, м на рис. 3 б). Чередование пар работающих
тиристоров происходит через 60°.
отпирающие импульсы на тиристоры
необходимо подавать в моменты, соответствующие точкам пересечения кривых фазных
напряжений (точки а, б, в и к, л, м на рис. 3 б). Чередование пар работающих
тиристоров происходит через 60°.
Пока угол регулирования ![]() кривые выпрямленного напряжения и
тока (рис. 3 в и г) непрерывны. Для этого режима (
кривые выпрямленного напряжения и
тока (рис. 3 в и г) непрерывны. Для этого режима (![]() )
величина среднего значения выпрямленного напряжения определяется выражением
)
величина среднего значения выпрямленного напряжения определяется выражением
![]() ,
,
где ![]() − величина выпрямленного напряжения
при
− величина выпрямленного напряжения
при ![]() ;
;
![]() − угол регулирования.
− угол регулирования.
Из рис. 3 г видно, что через вступающий в работу тиристор ток может проходить только при условии, что одновременно открывается или уже открыт соответствующий (смежный по порядковому номеру) тиристор другого плеча моста.
21
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.