



ВВЕДЕННЯ
Одним з ефективних засобів автоматизації й механізації виробничих процесів є широке застосування в різних галузях машинобудування гідроприводів, що стежать. Вони мають малі габаритні розміри й масу при високій питомій силовій напруженості, що забезпечує малу інерційність рухливих частин, високе швидкодія й точність відтворення вхідного сигналу.
Слідкуючі гідроприводи відрізняються плавністю й стійкістю руху, простотою конструкції, зручністю експлуатації й більшим ресурсом.
У багатьох випадках слідкуючі застосовують у комбінації з електричними засобами керування, що дає можливість сполучити електричні методи посилення й перетворення сигналу помилки із силовими гідравлічними механізмами, що розвивають найбільші сили, що доводяться на одиницю площі робочих органів, а також дозволяє здійснювати дистанційну передачу сигналів керування, можливість легкого введення коригувальних сигналів для поліпшення вихідних характеристик і спростити монтаж всієї гідросистеми. Електрогідравлічні системи забезпечують використання лічильно-вирішальної техніки при керуванні й автоматизації виробничих процесів.
Гідропривід широко використовують у копіювальних системах металорізальних верстатів, що працюють від твердого шаблона, для виконання точних ділильних і настановних операцій в агрегатних верстатах і автоматичних лініях.
Успішне застосування гідроприводу при створенні агрегатних верстатів і автоматичних ліній обумовлено простотою логічних схем, що дозволяють компонувати гідроприводи з обмеженого набору стандартних елементів і складальних одиниць, простотою здійснення лінійних переміщень механізмів за допомогою гідроциліндрів, а також регулювання швидкостей, що діють сил, можливістю швидкого реверсування й т.д.
У колісній і гусеничній транспортній машинах застосування слідкуючий гідропривід забезпечує легке керування.
Слідкуючий гідропривід усе ширше застосовується для автоматизації заготівельно-штампувального й ковальсько-пресового встаткування, у спеціалізованих іспитових стендах для здійснення високочастотних коливань.
У системах керування сучасних літальних апаратів гідропривід, що стежить, є основним виконавчим пристроєм. За допомогою гідроприводів можна досягти посилення вхідного сигналу керування по потужності в кілька тисяч разів і одержати на органах керування вихідні сили в кілька тонн.
Залежно від призначення системи керування розрізняють гідроприводи автопілоту, що управляють рулями, елеронами й поворотом крил літального апарата; гідроприводи бустерних систем, що дозволяють управляти вручну або автоматично рулями й елеронами важких літаків і вертольотів; автоматичні гідроприводи воздухозабірників, що регулюють подачу повітря у двигун; гідроприводи радіолокаційних антен і установок наведення, механізмів зміни геометрії крила, а також механізмів керування шасі й посадкових щитків літака.
Широке застосування гідроприводу в народному господарстві привело до створення виробляючої його високорозвиненої галузі промисловості, рівень якої багато в чому визначає й технічні характеристики гідроприводу. Надійність, ресурс, швидкодія, точність спостереження й інших важливих характеристик гідроприводів, що стежать, залежать не тільки від точності розрахунку, правильного вибору принципової схеми і її конструктивного виконання. Ці характеристики багато в чому визначаються вибором матеріалу, способами обробки й контролю робочих поверхонь, ступенем їхньої геометричної точності, висотою мікронерівностей, точністю складання, а також умовами випробувань окремих складальних одиниць і привода в цілому.
Перераховані вимоги ставляться до всіх основних частин привода й у першу чергу до елементів електромеханічного перетворювача, циліндричному й плоскому золотниковому розподільникам, постійним і змінним дроселям, виконавчим силовим механізмам і ущільнювальним пристроям.
Особливістю технологічних процесів обробки високоточних елементів гідроприводу, робочі зазори яких становлять 0,002-0,015 мм, а також корпусних деталей з розгалуженою каналізацією, є необхідність високого ступеня очищення від технологічних забруднень. Експлуатаційні характеристики гідроприводів і систем у цілому перебувають у прямої залежності від ступеня чистоти вхідних у них складальних одиниць і елементів і застосовуваних робочих рідин.
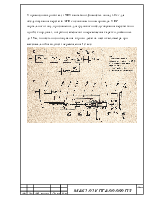
У загальному випадку широко застосовуваний слідкуючий гідропривід з електроуправлінням складається із джерел живлення, підсилювачів сигналів неузгодженості, електромеханічних перетворювачів, гідропідсилювачів потужності, виконавчих механізмів і елементів зворотного зв'язка.
У багатьох гідросистемах джерело живлення являє собою самостійний блок, що забезпечує енергією одночасно цілий ряд незалежних і різних по своєму призначенню систем і пристроїв. Підсилювач сигналу неузгодженості, призначена для підсумовування вхідного сигналу із сигналами зворотних зв'язків, а також для перетворення його до величини, достатньої для керування електромеханічним перетворювачем, у більшості випадків є одним з елементів загальної системи автоматичного керування.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.