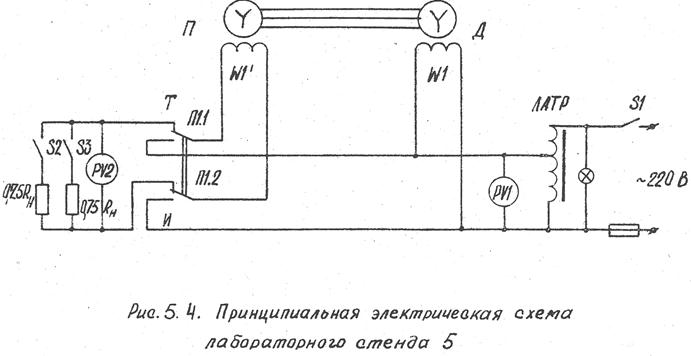
3) ЛАТР установить в нулевое положение и тумблером S1 подать напряжение питания на схему.
4)Установить ЛАТРом по вольтметру PV1 напряжение питания сельсинов Un= 110В.
5) Изменяя рукояткой ручного привода положение ротора ![]() 1сель
син-датчика Д и фиксируя положения ротора
1сель
син-датчика Д и фиксируя положения ротора ![]() 2сельсин-приемника П, снять зависимость
2сельсин-приемника П, снять зависимость ![]() 2=f(
2=f(![]() 1) .
1) .
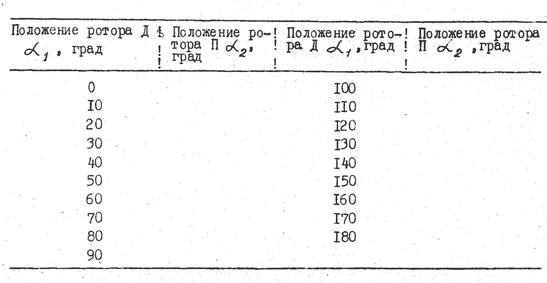
Результаты наблюдений свести в табл.5.1.
По данным табл.5.1 построить график зависимости ![]() 2=f(
2=f(![]() 1).
1).
Таблица 5.1
Результаты исследования работы сельсинов в индикаторном режиме
4. Исследование работы сельсинов в трансформаторном режиме
1) Тумблером S1 отключить питание стенда.
2) Переключатель П1 установить в положение "Т", соответствующее трансформаторному режиму работы.
3) Тумблеры S2, S3установить в нулевое положение, ооответст вующее работе сельсин-приемника без нагрузки.
4) Рукояткой ручного привода установить ротор сельсин-приемника в нулевое положение.
5) Ротор сельсин-датчика установить в положение 90°и, придерживая за лимб, подать тумблером S1 напряжение питания на схему.
б) Изменяя рукояткой ручного привода ротора сельсин-датчика углы рассогласования Q и делая отсчеты, по шкале вольтметра PV2 через каждые 10°, снять зависимость Uy=f(Q) при работе приемника
без нагрузки.
Результаты наблюдений свести в табл.5.2.
Повторить эксперимент при значениях нагрузки приемника: 0,25RH (тумблер S2 в положении 0,25 RH); 0,75 RH(тумблер S2 в нулевом, a S3 - в положении 0,75 RH ); 1RH( тумблеры S2, S3 в положениях 0,25 RH+ 0,75RH ).
Результаты наблюдений свести в табл.5.2.
По данным табл.5.2 построить семейство характеристик при указанных значениях нагрузки.
Таблица 5.2
Зависимость выходного сигнала от угла рассогласования
|
Угол рассогласования Q, град |
Величина выходного сигнала Uy ,В, при значениях нагрузки R |
|||
|
8 |
2Rн |
1,5Rн |
Rн |
|
|
0 |
||||
|
10 |
||||
|
20 |
||||
|
30 |
||||
|
40 |
||||
|
50 |
||||
|
60 |
||||
|
70 |
||||
|
80 |
||||
|
90 |
||||
|
100 |
||||
|
110 |
||||
|
120 |
||||
|
130 |
||||
|
140 |
||||
|
150 |
||||
|
160 |
||||
|
170 |
||||
|
180 |
||||
7) Рукояткой ручного привода ротора сельсин-датчика установить угол рассогласования Q , равный 20˚.
8) Изменяя тумблерами S2, S3 величину нагрузки и делая отсчеты по шкале вольтметра PV2, снять зависимость Uy = f(RH).
результаты наблюдений свести в табл. 5.3.
Повторить эксперимент для углов рассогласования Q, равных 40˚ и 60˚
Результаты наблюдений свести в табл. 5.3. По данным, табл.5.3 построить семейство характеристик при указанных углах рассогласования.
Таблица 5.3
Зависимость выходного сигнала от величины нагрузки
|
Величина нагрузки |
Величина выходного сигнала, В, при углах рассогласования, град |
||
|
Q=20 |
Q=40 |
Q=60 |
|
|
8 |
|||
|
2Rн |
|||
|
1,5Rн |
|||
|
Rн |
|||
5. Контрольные вопросы
1) Назначение сельсинов.
2) Принцип работы сельсинов в индикаторном режиме.
3) Принцип работы сельсинов в трансформаторном режиме.
4) Устройство сельсинов.
5) Вид статических характеристик сельсинов в индикаторном и трансформаторном режимах.
6) Применение сельсинов.
ЛАБОРАТОРНАЯ РАБОТА 5
ИССЛЕДОВАНИЕ ЭЛЕКТРИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ ТИПА ПР
1. Электрические исполнительные механизмы типа ПР
Электрические исполнительные механизмы служат для преобразования электрической энергии в механическую работу.
Электрические исполнительные механизмы типа ПР [2] применяются в системах пропорционального регулирования и представляют собой устройства, состоящие из двух асинхронных однофазных электродвигателей, корпуса с редуктором, концевых выключателей и пропорционального предельного
выключателя.
Электродвигатели состоят из двух короткозамкнутых роторов типа "беличье колесо", сидящих на одном валу, и двух статоров, закрепленных в корпусе исполнительного механизма. Вал электродвигателей может вращаться в двух направлениях в зависимости от того, обмотки какого из статоров находятся под напряжением.
Вращение с вала электродвигателей через редуктор со сменными шестернями, служащий для снижения числа оборотов и повышения крутящего момента, передается на выходной вал исполнительного механизма, снабженный диском, и (через реечную передачу) на шток для создания линейного перемещения. Это позволяет воздействовать как на поворотный регулирующий орган, так и на перемещающийся поступательно.
Концевые выключатели механически связаны о выходным валом исполнительного механизма и служат для ограничения угла поворота, выходного вала. При достижении им заданного крайнего положения соответствующий концевой выключатель размыкает цепь питания электродвигателя.
Пропорциональный предельный выключатель служит для получения пропорциональной характеристики работы исполнительного механизма, а также для ограничения рабочего диапазона двигателя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.