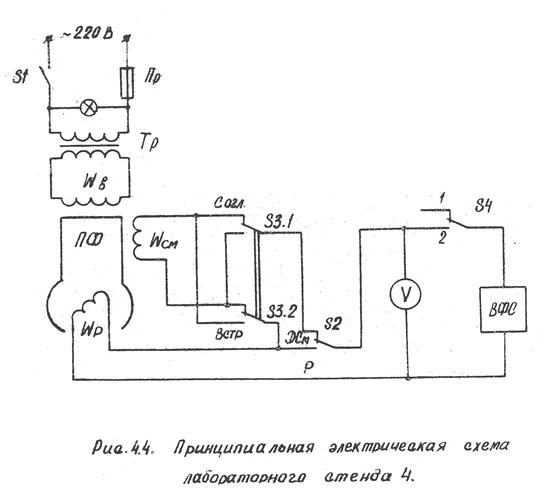
Принципиальная электрическая схема лабораторного стенда приведена на рис. 4. 4. В работе исследуется промышленный ферродинамический преобразователь типа ПФ3, в котором дополнительно обеспечена возможность изменения подключения обмотки смещения и ее исключения из схемы.
3. Исследование основной схемы ферродинамического преобразователя
1) Тумблер S2 установить в положение "Р" .
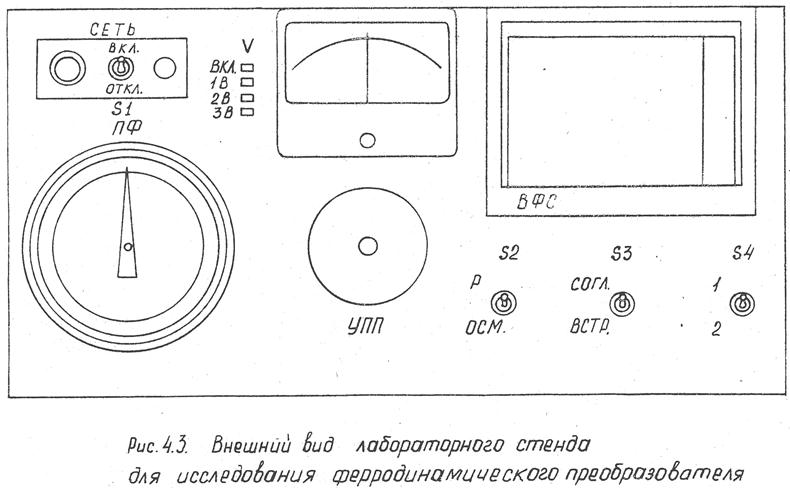
2) Регулятором УПП установить плунжер в среднее (нейтральное) положение.
3) Тумблер S4 установить в положени"I".
4) Переключатель пределов измерения вольтметра V установить в положение "I В".
5) Указатель ПФ установить в среднее (нейтральное) положение и тумблером S1 подать напряжение питания на схему.
6) Изменяя положение рамки ПФ с помощью указателя от одного крайнего
положения до другого и делая отсчеты по шале вольтметра через каждые 4°, снять
зависимость U1=f(![]() ) . Положительным
считать
) . Положительным
считать
отклонение указателя и стрелки вольтметра от среднего положения по часовой стрелке.
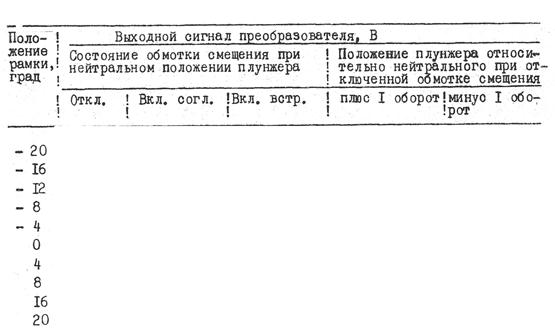
Результаты наблюдений свести в табл.4.1.
Таблица 4.1.
Результаты исследования ферродинамического преобразователя
4. Исследование влияния обмотки смещения на работу преобразователя
1) Тумблер S2 установить в положение "ОСМ".
2) Тумблер S3 установить в положение "Согл.".
3) Переключатель пределов измерения вольтметра V установить в положение"2 В".
4) Снять зависимость U2 = f (![]() ). Результаты наблюдений
свести в табл.4.1.
). Результаты наблюдений
свести в табл.4.1.
5) Тумблер S3 установить в
положение "Встр." и снять зависимость U3 = f (![]() ).
).
Результаты наблюдений свести в табл.4.1.
5. Исследование влияния плунжера на работу преобразователя
1) Тумблер S2 установить в положение "Р".
2) Переключатель пределов вольтметра V установить в положение "I B".
3) Регулятором УПП повернуть плунжер на один оборот по часовой
стрелке от нейтрального положения ( плюс 1 оборот) .
4) Снять зависимость U4 = f (![]() ) . Результаты
наблюдений свести в табл. 4.1.
) . Результаты
наблюдений свести в табл. 4.1.
5) Регулятором УПП повернуть плунжер на один оборот против часовой стрелки от нейтрального положения ( минус I оборот).
6) Снять зависимость U5 = f (![]() ). Результаты наблюдений
свести в табл. 4.1.
). Результаты наблюдений
свести в табл. 4.1.
По данным табл.4.1. построить в одних координатных осях графики
U1
= f (![]() ), U2 = f (
), U2 = f (![]() ), U3 = f (
), U3 = f (![]() ), U4 = f (
), U4 = f (![]() ), U5 = f (
), U5 = f (![]() ).
).
6. Контрольные вопросы
1) Назначение ферродинамических преобразователей.
2) Принцип работы ферродинамического преобразователя.
3) Устройство ферродинамического преобразователя.
4) Назначение плунжера.
5) Назначение обмоток возбуждения, смещения и рамки.
6) Принцип действия обмотки смещения.
7) Принцип действия плунжера.
8) Вид статических характеристик ферродинамического преобразователя
в зависимости от состояния обмотки смещения и положения плунжера.
9) Применение ферродинамических преобразователей.
ЛАБОРАТОРНАЯ РАБОТА 4
ИССЛЕДОВАНИЕ СЕЛЬСИНОВ
1. Сельсины
Сельсины [3] представляют собой малогабаритные индукционные машины переменного тока с трехфазной вторичной обмоткой.
Все существующие сельсины можно подразделить на контактные и бесконтактные. Устройство контактного сельсина сходно с устройством электрического двигателя. Он состоит из неподвижного статора, на котором размещается однофазная первичная обмотка, и вращающегося в нем ротора, на котором размещена трехфазная вторичная обмотка. Однофазную называют еще обмоткой возбуждения, а трехфазную - обмоткой синхронизации.
В бесконтактных сельсинах однофазная и трехфазная обмотки уложены на статоре. Ротор представляет собой магнитопровод специальной конструкции.
Наиболее широкое применение сельсины получили в системах синхронной связи. Принципиальная схема синхронной связи при работе сельсинов в индикаторном режиме приведена на рис. 5.1. Под индикаторным (указательным) режимом работы сельсинов понимается режим дистанционной передачи углового перемещения ротора датчика Д при работе на стрелку приемника П (так называемая система с нулевым нагрузочным моментом на валу приемника). Широкое распространение сельсинов объясняется их весьма ценным свойством - способностью к самосинхронизации независимо от начального положения роторов датчика и приемника (отсюда и названия: самосин, сельсин).
Принцип действия сельсинов независимо от особенностей их конструкции одинаков. Как видно из рис. 5.1,в индикаторном режиме одноименные трехфазные обмотки включаются встречно, а однофазные обмотки датчика и приемника запитываются переменным током промышленной (50 Гц) или повышенной (400-500 Гц) частоты и создают пульсирующие магнитные потоки возбуждения Ф1 и Ф1'. Эти потоки пронизывают трехфазные обмотки роторов и наводят в них эдс, амплитуда и фаза которых зависят от угла между осями обмотки возбуждения и соответствующей обмотки ротора.
Система уравнений эдс для датчика
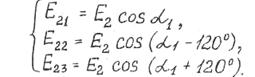 (5.1)
(5.1)
Система уравнений эдс для приемника
где E21,E22,E23 - фазные эдс;
E2 и E'2 - максимальные фазные эдс датчика и приемника, наводимые в фазах их трехфазной обмотки, магнитные оси которых совпадают о осью однофазной обмотки;
![]() 1 - угол
отклонения ротора датчика от начального положения (при котором магнитная ось
однофазной обмотки совпадает с первой фазой трехфазной обмотки);
1 - угол
отклонения ротора датчика от начального положения (при котором магнитная ось
однофазной обмотки совпадает с первой фазой трехфазной обмотки);
![]() 2 - угол
отклонения ротора приемника от начального положения.
2 - угол
отклонения ротора приемника от начального положения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.