Совместив начало координат с точкой X= 1,6535 дюйм и направив ось U вниз из нового начала координат, перестроить график U21=f (х) в новой системе координат. Полученный таким образом график U22=f (х) соответствует статической характеристике простого трансформаторного датчика, составляющего вторую (не исследованную экспериментально) половину ДТД, образованную вторичной W22 и первичной обмотками W12.
Построить график зависимости U2Т=f(x) ДТД путем графического вычитания из ординат графика U21 = f (х) ординат графикаU22 = f (х).
4. Исследование дифференциального трансформаторного датчика
1) Тумблер S2 установить в положение "Диф.схема".
2) Снять экспериментальную зависимость U2Э = f (х) при Un = 10 В и Un = 15 В.
Результаты наблюдений свести в табл. 3.1.
По данным табл.3.1 построить графики U2Э = f (х) для Un= 10 В и Un= 15В в тех же координатных осях, что и предыдущие графики.
Сравнить графики U2Т = f (х) и U2Э = f (х).
5 Контрольные вопросы
1) Назначение трансформаторных датчиков.
2) Принцип работы трансформаторного датчика.
3) Устройство простого и дифференциального трансформаторного датчиков.
4) Преимущества дифференциального трансформаторного датчика перед простым.
5) Вид статических характеристик простого и дифференциального трансформаторных датчиков.
6) Применение трансформаторных датчиков.
ЛАБОРАТОРНАЯ РАБОТА 3
ИССЛЕДОВАНИЕ ФЕРРОДИНАМИЧЕСКЙХ ПРЕОБРАЗОВАТЕЛЕЙ
1. Ферродинамические преобразователи
Ферродинамические датчики являются преобразователями угловых перемещений в пропорциональные значения эдс переменного тока.
Магнитная система преобразователя (рис. 4. 1), образованная магнитопроводом 1, башмаком 2, сердечником 3 и плунжером 4, имеет два воздушных зазор: кольцевой зазор 5 и регулируемый с помощью плунжера 4 зазор 6.
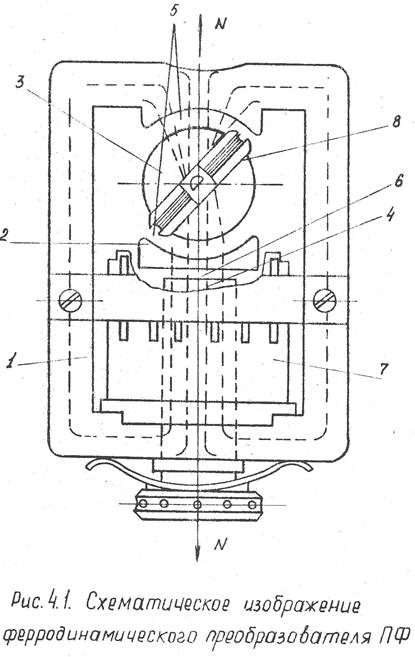
Обмотка возбуждения преобразователя Wв размещена в катушке 7 и питается переменным током промышленной частоты. Создаваемый ею магнитный поток индуктирует эдс в обмотке смещения Wсм, намотанной поверх обмотки возбуждения, и в обмотке Wp рамки 8 преобразователя. Обмотки рамки и смещения преобразователя соединяются последовательно.
Принцип работы датчика состоит в следующем. При подаче на обмотку
возбуждения переменного тока в магнитопроводе возникает магнитный поток. В
воздушном зазоре, в котором перемещается рамка, создается радиальный магнитный
поток. В нейтральном положении рамки NN
магнитный поток не пересекает ее плоскость и величина наводимой в ней эдс равна
нулю. При повороте рамки на угол ![]() от нейтрали в ней
индуктируется величина эдс, пропорциональная углу поворота.
от нейтрали в ней
индуктируется величина эдс, пропорциональная углу поворота.
Фаза наводимой эдс меняется на 180° при повороте рамки в одну или другую сторону от нейтрали.
Рабочий угол поворота рамки составляет 40° (по 20° от нейтрали в каждую сторону).
Выбор такого диапазона измерения обусловлен нелинейностью закона изменения эдс при повороте рамки от нейтрали. Он имеет вид [2]
![]()
где w - угловая частота;
![]() - число потокосцеплений рамки;
- число потокосцеплений рамки;
Bc- амплитудное значение средней индуктивности в зазоре;
l - активная длина рамки;
R - средний радиус рамки.
Но в указанном выше диапазоне можно принять ![]()
т.е. характеристика будет линейной.
На рис. 4.2,а приведены статические характеристики датчика, выражающие зависимость между углом поворота рамки и выходным напряжением при нормальном напряжении возбуждения.
По оси абсцисс отложена величина угла поворота рамки от нейтрали в градусах, а по оси ординат - значение выходного напряжения датчика.
Характеристика I относится к датчикам без обмотки смещения, выходное напряжение которых меняется от -1,2В до +1,2В при углах поворота рамки от -20 до +20° относительно нейтрали.
Характеристика 2 относится к датчикам с выходным напряжением от 0
до 2,4В при. повороте рамки на тот же угол. В этих датчиках нулевому значению
эдс соответствует положение рамки в одном из ее крайних положений, например,
при ![]() , равном -20°. Это постигается за
счет суммирования эдс рамки с эдс обмотки смещения при согласном включении
обмоток.
, равном -20°. Это постигается за
счет суммирования эдс рамки с эдс обмотки смещения при согласном включении
обмоток.
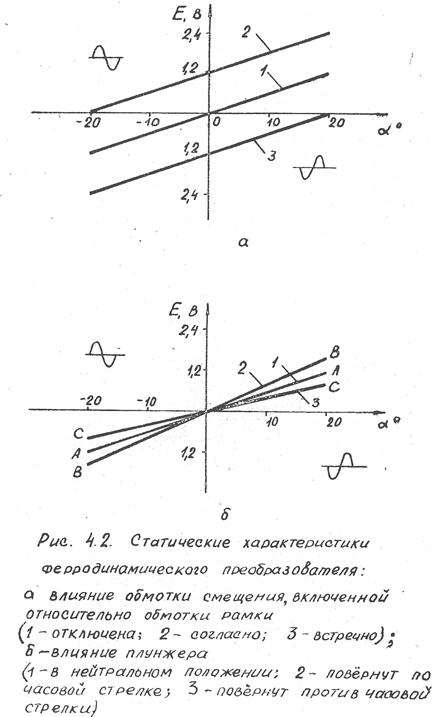
Меняя подключение концов обмотки смещения, т.е. включая ее встречно с обмоткой рамки, можно получить нулевое значение суммарной эдс при другом крайнем положении рамки (характеристика 3).
При повороте плунжера изменяется величина воздушного зазора, т.е. изменяется сопротивление магнитной цепи и индуктивность в зазоре. Следовательно, согласно (4.1), при одном и том же угле поворота в рамке . индуцируется эдс иной величины (точки В и С рис.4.2, б).
Нелинейность характеристик датчика в пределах рабочего угла поворота не превышает ± 0,4 %.
Ферродинамические датчики, используются для преобразования угловых механических перемещений в электрический сигнал, например, в качестве выходных датчиков приборов для измерения давления или расхода. Кроме того, их применяют для реализации математических операций, например, в суммирующих, множительно-делительных блоках.
3. Описание лабораторного стенда
Внешний вид лабораторного стенда для исследования ферродинамического преобразователя приведен на рис. 4.3. На лицевой панели установлены:
1) Ферродинамический преобразователь ПФ, имеющий, указатель со шкалой, и выведенный наружу регулятор положения плунжера УПП.
2) Вольтметр V с переключателем пределов для измерения выходного сигнала преобразователя.
3) Вторичный прибор ферродинамической системы ВФС для регистрации выходного сигнала преобразователя..
4) Тумблер S1 для включения питания стенда с предохранителем и индикаторной лампой.
5) Тумблер S2 для подключения обмотки смещения к обмотке рамки,
6) Тумблер S3 для включения обмотки смещения "согласно" или "встречно" с обмоткой рамки.
7) Тумблер S4 для подключения к выходу преобразователя вторичного прибора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.