2.6.5 Какие воздействия используются для получения переходных характеристик, а какие – для частотных?
Список литературы
1. Теория автоматического управления / Под ред. А.В. Нетушила, - М.: Высш. шк., 1976. – 400 с.
2. Юревич Е.И. Теория автоматического управления. – Л.: Энергия, 1975. – 412 с.
3. Дьяконов В., Круглов В. MATLAB. Анализ, идентификация и моделирование систем. Специальный справочник. – СПб.: Питер, 2002. – 448 с.
3 Лабораторная работа №2
определение параметров типовых звеньев по временным характеристикам
3.1 Цель лабораторной работы
Целью данной лабораторной работы является изучение динамических свойств типовых звеньев систем автоматического управления и методов определения их параметров по экспериментальным характеристикам.
3.2 Теоретическая подготовка
В лабораторной работе исследуются временные характеристики инерционного, колебательного и инерционно-форсирующего (упругого) звеньев, а именно:
1)
переходная функция - ![]() ;
;
2)
импульсная переходная (весовая) функция - ![]() .
.
Необходимые сведения об этих характеристиках и методике их расчета изложены в работе [1].
Внимательно проанализируйте выражения для переходной и весовой функции вышеназванных звеньев и установите, от каких параметров зависят их статические и динамические свойства.
Для исследования динамических свойств типовых звеньев воспользуйтесь следующими выражениями передаточных функций:
1) для инерционного звена
 ; (3.1)
; (3.1)
2) для колебательного звена
 ; (3.2)
; (3.2)
3) для инерционно-форсирующего звена
 ; (3.3)
; (3.3)
Проинтегрировав уравнения (3.1) и (3.2) можно получить следующие выражения для расчета временных характеристик:
1) для инерционного звена
 , (3.4)
, (3.4)
 ; (3.5)
; (3.5)
2) для колебательного звена
 , (3.6)
, (3.6)
 , (3.7)
, (3.7)
где
 . (3.8)
. (3.8)
Здесь ![]() - собственная частота колебаний
звена;
- собственная частота колебаний
звена;
![]() -
резонансная частота;
-
резонансная частота;
![]() -
коэффициент затухания;
-
коэффициент затухания;
![]() -
степень затухания (относительный коэффициент затухания).
-
степень затухания (относительный коэффициент затухания).
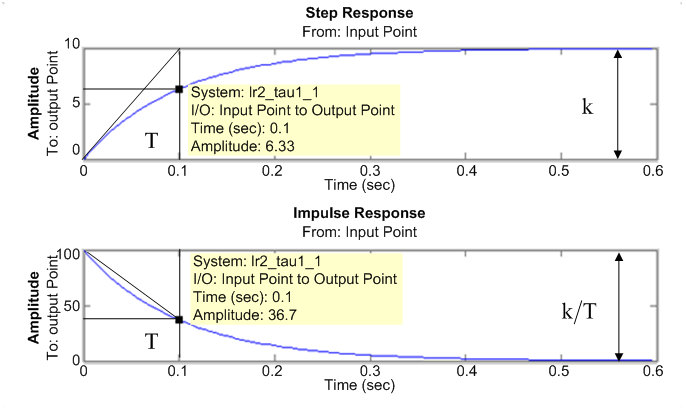
Примерный вид графиков ![]() и
и ![]() инерционного
и колебательного звеньев приведен на рис. 3.1 и 3.2 соответственно.
инерционного
и колебательного звеньев приведен на рис. 3.1 и 3.2 соответственно.
Как видно из рис. 3.1, коэффициент передачи апериодического звена можно определить как
![]() , (3.9)
, (3.9)
где ![]() - величина установившегося значения
функции
- величина установившегося значения
функции ![]() .
.
При
снятии переходных характеристик реальных динамических звеньев обычно
используется скачек с амплитудой отличной от единицы (![]() ).
В этом случае кривая
).
В этом случае кривая ![]() подобна
подобна ![]() , но ее ординаты в
, но ее ординаты в ![]() раз больше, чем ординаты
раз больше, чем ординаты ![]() , а формула (3.9) принимает вид
, а формула (3.9) принимает вид
 . (3.10)
. (3.10)
 |
 |
Постоянная
времени ![]() равна величине отрезка, отсекаемого
на горизонтальной асимптоте экспоненты прямой, проведенной касательной к ней.
Однако, учитывая что точное проведение касательной сопряжено с определенными
сложностями, более точно постоянную времени
равна величине отрезка, отсекаемого
на горизонтальной асимптоте экспоненты прямой, проведенной касательной к ней.
Однако, учитывая что точное проведение касательной сопряжено с определенными
сложностями, более точно постоянную времени ![]() можно
определить по величине отрезка времени, на котором
можно
определить по величине отрезка времени, на котором ![]() становится
равной
становится
равной ![]() . Убедитесь, что подстановка
. Убедитесь, что подстановка ![]() в уравнение (3.4) дает выражение
соответствующее данному утверждению.
в уравнение (3.4) дает выражение
соответствующее данному утверждению.
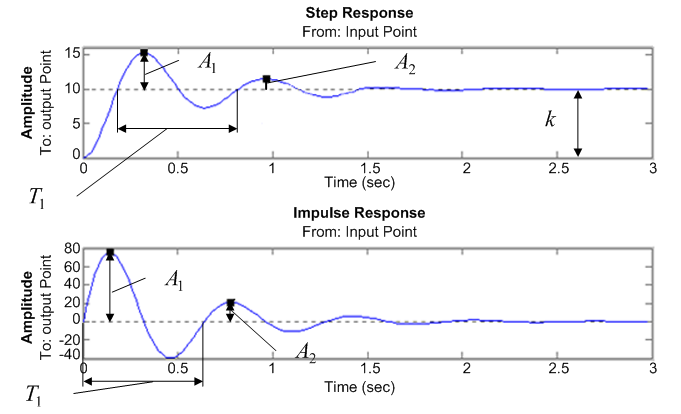
Параметры (![]() ) для колебательного звена определите
с учетом графиков, представленных на рис. 3.2 из следующих уравнений:
) для колебательного звена определите
с учетом графиков, представленных на рис. 3.2 из следующих уравнений:
 . (3.11)
. (3.11)
Временные характеристики инерционно-форсирующего звена и методику определения его параметров по этим характеристикам можно найти в работе [1]. Запомните, что существенным параметром инерционно-форсирующего звена, определяющего его тип, является коэффициент:
![]() , (3.12)
, (3.12)
где ![]() - постоянная
времени форсирующей части звена;
- постоянная
времени форсирующей части звена;
![]() -
постоянная времени инерционной части звена;
-
постоянная времени инерционной части звена;
3.3 Исходные данные
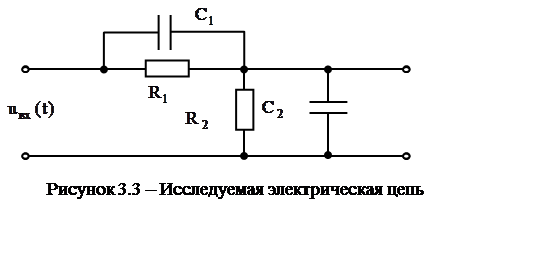
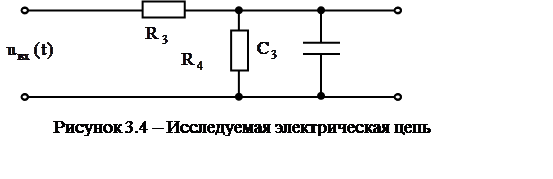
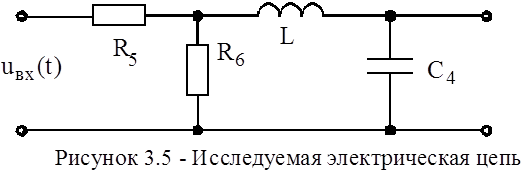
Принципиальные схемы исследуемых электрических цепей представлены на рис. 3.3 – 3.5. В ходе работы данные электрические цепи следует сопоставить типовым звеньям динамических систем. Параметры приведенных на рисунках элементов указаны в табл. 3.1.
3.4 Программа работы
3.4.1 Используя прикладной пакет Power System Blockset системы MATLAB, составьте схему модели для получения временных характеристик электрической цепи №1 (рис. 3.3). Методика получения временных характеристик с помощью Power System Blockset приведена в лабораторной работе №1. Выполнение данного пункта существенно облегчает использование файла LR1_1.MDL.
3.4.2 Сохраните модель в файле LR2_1.MDL.
3.4.3 Получите графики переходной и весовой характеристик, сохраните их в виде рисунков в файле отчета OTCH_LR2.DOC.
3.4.4 Определите тип динамического звена соответствующего исследуемой электрической цепи.
 |
 |
 |
3.4.6 Подставьте найденные параметры в соответствующую данному звену передаточную функцию и исследуйте ее во временной области с помощью LTI Viewer. Полученные временные характеристики сохраните в виде рисунков в файле OTCH_LR2.DOC.
3.4.7 Сопоставьте временные характеристики полученные с помощью Power System Blockset и LTI Viewer.
3.4.8 Повторите пункты 3.4.1 – 3.4.7 для схем, приведенных на рис. 3.4 и 3.5.
Таблица 3.1 – Параметры элементов электрических цепей
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.