Правило 9. Расчётную схему и план сил изображают на одном листе во избежание искажений при переносе линий.
6.
Векторное уравнение для звена 2 содержит искомую реакцию ![]() во внутренней кинематической паре диады:
во внутренней кинематической паре диады:
![]() . (4.9)
. (4.9)
Искомый вектор ![]() определяют
замыканием векторного многоугольника. Для этого из конца отрезка
определяют
замыканием векторного многоугольника. Для этого из конца отрезка ![]() проводим
вектор в начало отрезка
проводим
вектор в начало отрезка ![]() . Искомая реакция
. Искомая реакция
![]() = 57/0,007 = 8143 Н.
= 57/0,007 = 8143 Н.
Векторное уравнение для определения реакции во внутренней кинематической паре может быть составлено также для звена 3 с определением противодействующей реакции R23, равной по модулю R32, но противоположно направленной (рис. 4.2).
Момент сил полезного сопротивления МС,
вес звеньев, силы и моменты сил инерции через реакции в кинематических парах R передаются на начальное
звено. На него также действует вес G1. Сила инерции Fи1
= 0, так как aS1 = 0; момент сил инерции Mи1
= 0, так как ![]() = 0.
= 0.
Под действием всех сил начальный
механизм не находится в равновесии, а вращается с угловой скоростью ω1. Для уравновешивания начального звена вводят уравновешивающий
момент ![]() , что соответствует остановке начального
звена. Момент
, что соответствует остановке начального
звена. Момент ![]() определяют из уравнения
моментов относительно точки A (рис. 4.3):
определяют из уравнения
моментов относительно точки A (рис. 4.3):
![]() . (4.10)
. (4.10)
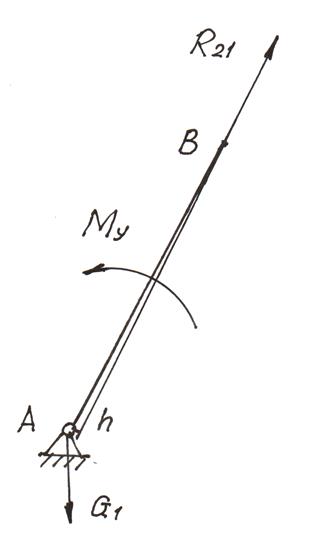
Рис. 4.3
Реакцию ![]() прикладывают в точке В
противоположно
прикладывают в точке В
противоположно ![]() , так как в каждой кинематической
паре реакции, приложенные к звеньям, равны по модулю и противоположны
по направлению. При h = 1 мм
, так как в каждой кинематической
паре реакции, приложенные к звеньям, равны по модулю и противоположны
по направлению. При h = 1 мм
![]() - 13286·1/200 = - 66,4
Н·м. (4.11)
- 13286·1/200 = - 66,4
Н·м. (4.11)
Реакцию ![]() определяем из
векторного уравнения равновесия звена 1:
определяем из
векторного уравнения равновесия звена 1:
![]() .
(4.12)
.
(4.12)
Векторный треугольник сил изображен на рис. 4.4.
Так как ![]() = 0
= 0
![]() =
=![]() =
=![]() =15286 Н.
=15286 Н.
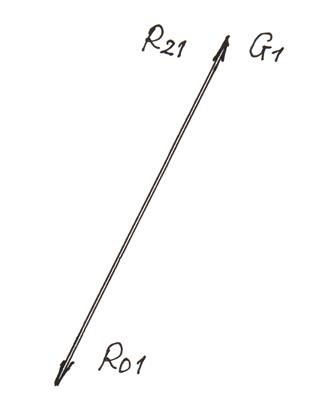
Рис. 4.4
8. Мощность сил полезных сопротивлений:
Pпс = Myω1 = 66,4∙150 = 9960Вт = 10 кВт. (4.13)
9. Радиусы шарниров:
![]() (4.14)
(4.14)
![]()
![]()
Реакции, рассчитанные для заданного положения, могут оказаться не самыми большими, а радиусы шарниров могут быть заниженными. Для получения реальных радиусов их следует принимать в зависимости от длин звеньев:
r01 = 0,3lAB; r12 = 0,2lAB; r23 = 0,075lBС; r03 = 0,15lCD. (4.15)
r01 = 0,3lAB = 0,3∙0,1 = 0,03 м; r12 = 0,2∙0,1 = 0,02 м;
r23 = 0,075∙0,2 = 0,015 м; r03 = 0,15∙0,3 = 0,045 м.
10. Относительные угловые скорости:
ω01 = |ω0 – ω1| = 150 с-1; ω12 = |ω1 – ω2| = |150 – (–71,08)| = 221,08 с-1; (4.16)
ω23 = |ω2 – ω3| = |–71,08 – 7,64| = 78,72 с-1; ω03 = |ω0 – ω3| = 7,64 с-1.
11. Мощность сил трения:
Pт = R01 fв ω01 r01 + R12 fв ω12 r12 + R23 fвω23 r23 + R03 fв ω23 r03 = (4.17)
= 13286∙0,08∙150∙0,03 + 13286∙0,08∙221,08∙0,02 + 8143∙0,08∙78,72∙0,015 +
+ 5286∙0,08∙7,64∙0,045 = 10397 Вт = 10,4 кВт.
В формуле (4.17):
f - коэффициент трения скольжения; рекомендуется принимать fв = 0,08 во вращательных кинематических парах; fп = 0,1 в поступательных парах.
12. Мгновенная мощность:
Рмгн = Рпс + Рт = 10 + 10,4 = 20,4 кВт. (4.18)
13. Механический КПД:
η = Рпс/Рмгн= 10/20,4 = 0,49. (4.19)
Исходные данные для анализа приведены в табл. 4.1.
Таблица 4.1.Исходные данные кривошипно-коромыслового механизма
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.