Fи2 = m2∙aS2 = 2 ∙ 2634,53 = 5269 Н; Fи3 = 5 ∙ 1007,06 = 5035 Н.
Правило 2. Силу инерции прикладывать против направления ускорения центра масс звена.
- модули моментов сил инерции звеньев (на схеме направлять против угловых ускорений):
Ми2 = IS2ε2 = 0,07 ∙ 6115,53 = 428,1 Н∙м;
Ми3 = IS2ε2 = 0,04 ∙ 11189,37 = 447,6 Н∙м.
Правило 3. Момент сил инерции прикладывать против направления углового ускорения звена.
В качестве расчётной схемы силового расчёта используют план положений диады в масштабе ml . с нанесенными на него силами и моментами. Проводя линии действия сил G и Fи, опускают на них из точки С перпендикуляры, длины которых hi являются плечами сил. Длины отрезков на схеме рис. 4.1 в масштабе ml = 200 мм/м: ВС = 40 мм; СD = 60 мм; ВS2 = 16 мм; DS3 = 18 мм; h1 = 15 мм; h2 = 3 мм;h3 = 25 мм; h4 = 42 мм.
3. Аналитическое моментное уравнение относительно точки С для звена 2:
![]() ;
; ![]() .
(4.4)
.
(4.4)
Правило 4. В соответствии с принципом Даламбера в аналитическое уравнение включены силы инерции и моменты сил инерции.
Правило 5. Знаки моментов принимать: плюс – при направлении против часовой стрелки, минус – по часовой стрелке.
Из уравнения (4.4) находим составляющую ![]() :
:
![]()
= (20∙15 + 5269∙3 – 428,1∙200)/40 = - 1738 Н.
В данном примере фактическое направление составляющей реакции ![]() противоположно изображённому на схеме.
противоположно изображённому на схеме.
4. Аналитическое моментное уравнение относительно точки С для звена 3:
![]() ;
; ![]() (4.5)
(4.5)
Из уравнения (4.5) находим составляющую ![]() :
:
![]()
= (49∙25 - 5035∙42 + (447,6 + 1030) ∙ 200)/60 = 1421 Н.
5. Векторное уравнение для диады 2–3
с двумя искомыми векторами![]() и
и![]() ,
известными по направлению, следует записывать по трём правилам.
,
известными по направлению, следует записывать по трём правилам.
Правило 6. При составлении векторного уравнения вначале записывают векторы, известные по величине и направлению; векторы, известные только по направлению, ставят в конец уравнения.
Правило 7. Последовательно записывают векторы сил, действующих на звенья: вначале на одно звено, затем на другое.
Правило 8. Нормальные и тангенциальные составляющие реакций располагают рядом.
Для выбора масштаба плана сил рекомендуется под уравнением подписать модули сил. В данном примере векторное уравнение:
![]() .
(4.6)
.
(4.6)
1738 20 5269 49 5035 1421
В
уравнении (4.6) отсутствуют моменты сил; они присутствуют неявно в виде
реакций ![]() и
и![]() , которые определены из
формул (4.4) и (4.5), содержащих моменты сил. Масштаб плана сил определяем по
наибольшему вектору:
, которые определены из
формул (4.4) и (4.5), содержащих моменты сил. Масштаб плана сил определяем по
наибольшему вектору:
![]() = 37/5269
= 0,007 мм/Н. (4.7)
= 37/5269
= 0,007 мм/Н. (4.7)
Длины отрезков, изображающих известные векторы:
![]() = 1738 ∙ 0,007 = 12 мм;
= 1738 ∙ 0,007 = 12 мм; ![]() =1421 ∙ 0,007 = 10 мм. (4.8)
=1421 ∙ 0,007 = 10 мм. (4.8)
![]() = 20 ∙ 0,007 = 0,14 мм;
= 20 ∙ 0,007 = 0,14 мм; ![]() = 49 ∙ 0,007 = 0,34 мм;
= 49 ∙ 0,007 = 0,34 мм; ![]() = 5035 ∙ 0,007 = 35 мм.
= 5035 ∙ 0,007 = 35 мм.
Отрезки ![]() и
и ![]() меньше 2 мм и на плане сил не показываем. План сил диады 2-3 (рис. 4.2) строим по уравнению (4.6).
Проводим первый отрезок
меньше 2 мм и на плане сил не показываем. План сил диады 2-3 (рис. 4.2) строим по уравнению (4.6).
Проводим первый отрезок ![]() длиной 12 мм в направлении, противоположном изображённому на рис. 4.1, так как из моментного уравнения
получена отрицательная величина
длиной 12 мм в направлении, противоположном изображённому на рис. 4.1, так как из моментного уравнения
получена отрицательная величина ![]() . Из его конца проводим
отрезок
. Из его конца проводим
отрезок ![]() = 37 мм, далее отрезки
= 37 мм, далее отрезки ![]() =
35 мм и
=
35 мм и ![]() = 10 мм. Из конца отрезка
= 10 мм. Из конца отрезка ![]() проводим
ему перпендикулярное направление
проводим
ему перпендикулярное направление ![]() , а из начала
, а из начала ![]() - перпендикулярное направление
- перпендикулярное направление ![]() до его пересечения с направлением
до его пересечения с направлением ![]() .
.
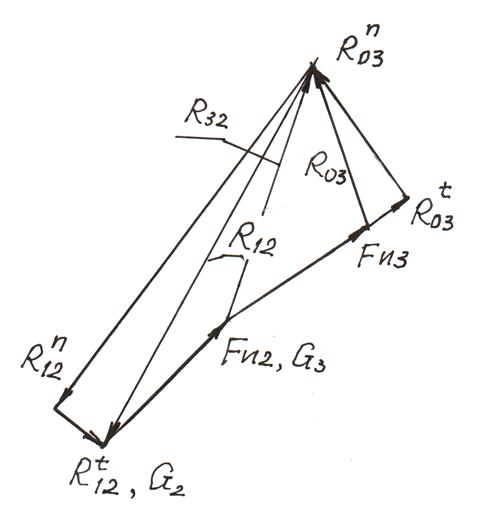
Рис. 4.2
Векторный
многоугольник в соответствии с
уравнением (4.6) должен быть замкнутым, так как правая часть уравнения
равна нулю. Это означает, что на плане сил стрелки векторов должны следовать
друг за другом. Полные реакции определяют геометрическим суммированием в
виде векторов, проведенных из начала первого вектора ![]() в
конец второго
в
конец второго ![]() . Из построений находим модули
векторов:
. Из построений находим модули
векторов:
![]() = 93/0,007 = 13286 Н;
= 93/0,007 = 13286 Н; ![]() = 37/0,007 = 5286 Н.
= 37/0,007 = 5286 Н.
Направления векторов определяют из плана сил (рис. 4.2).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.