Датчик, приведенный на рис. 7, г, может быть использован для измерения температуры охлаждающей воды на выходе из головки двигателя, т. е. теплового состояния двигателя. При изменении температуры ползунок 2 изменяет выходное сопротивление потенциометра 1, которое может быть связано, например, с резистором генератора 1 (см. рис. 6), что обеспечит коррекцию числа вырабатываемых им импульсов и соответствующую коррекцию цикловой подачи топлива.
Аналогично может быть осуществлена коррекция цикловой подачи топлива по температуре топлива (и, следовательно, по его плотности), если датчик температуры вмонтировать в головку топливного насоса высокого давления.
Приведенные выше примеры включения датчиков в схему электронного регулятора свидетельствуют о широких возможностях таких регуляторов формировать цикловую подачу топлива с учетом многих параметров, характеризующих состояние самого двигателя, рабочих тел (топлива, воздуха) и окружающей среды.
Появление интегральных микросхем существенно расширило возможности использования электроники в системах автоматического управления объектами и, в частности, двигателями внутреннего сгорания.
Микропроцессор, дополненный запоминающими устройствами и устройствами ввода-вывода, образует микроЭВМ, которая обеспечивает возможность целевого программирования процедур обработки данных, получаемых от датчиков и задатчиков, и формирования соответствующих управляющих воздействий, воспринимаемых исполнительным устройством. Знание результатов комплексного воздействия совокупности многих параметров рабочих тел, окружающей среды и режимов работы самого двигателя на качество работы двигателя создает условия для разработки соответствующих программ для мини-ЭВМ, оптимизации управляющих воздействий в целях, например, обеспечения минимального расхода топлива на каждом режиме, что трудно реализовать с помощью автоматических регуляторов, работающих на механической, гидравлической или пневматической основе.
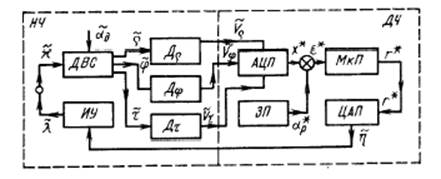
Рисунок 8 Функциональная схема системы автоматического регулирования с электронным (микропроцессорным) регулятором.
Микропроцессорный регулятор строится на базе микро ЭВМ и поэтому может обрабатывать сигналы датчиков только в дискретной форме. Эта часть САР обычно называется дискретной (ДЧ на рис. 8). Сам двигатель ДВС, исполнительное устройство ИУ, датчики (Др; Дф; Дτ и др.) различных параметров двигателя имеют непрерывные аналоговые характеристики и в своей совокупности составляют непрерывную часть (НЧ) электронной САР.
Для передачи сигналов из НЧ в ДЧ и обратно эти сигналы должны соответствующим образом преобразовываться. С этой целью в структуру регулятора включаются аналого-цифровой преобразователь АЦП, преобразующий аналоговый сигнал в дискретный, и цифроаналоговый преобразователь ЦАП, преобразующий дискретный сигнал в аналоговый.
В АЦП непрерывный сигнал подвергается квантованию по времени с шагом Δt, т. е. сигнал получает определенные значения только в моменты времени 0, Δt, 2Δt,… nΔt, ... Полученный таким образом сигнал х* (t) представляет собой последовательность цифровых двоичных кодов, которые в дискретные моменты времени передаются в процессор МкП (см. рис. 8). Сопоставлением данного сигнала x*(t) с сигналом αp(t), поступающим от задатчика программы ЗП (в данном случае — дискретного), микро ЭВМ вырабатывает дискретный сигнал погрешности, на основании которого в каждый тактовый момент времени (0, Δt, 2Δt, .... nΔt, ...) в соответствии с выбранным законом регулирования вычисляется дискретный регулирующий сигнал r*(t). Если же задатчик программы выдает сигнал в аналоговой форме, то перед входом в процессор этот сигнал следует преобразовать в дополнительном АЦП.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.