Еэ = kE∙Ф∙ωP, где kE — постоянный коэффициент; Ф – поток возбуждения. При отсутствии нагрузки поток возмущения остается постоянным, в связи с чем электродвижущая сила практически пропорциональна угловой скорости, т.е.
Еэ = k∙ω
где k = kE∙up∙Ф; Up – передаточное отношение механизма связи регулятора с коленчатым валом двигателя.
Если тахогенератор нагружен, то появляется поток реакции якоря, направленный против потока возбуждения, что нарушает линейность зависимости Еэ = f(ω). Поэтому для повышения точности работы тахогенератора при включении его в работу необходимо стремиться к минимально возможной нагрузке на якорь. При отсутствии такой нагрузки Е≈и, и тогда в соответствии с (1) связь входной и выходной координат датчика может быть принята линейной:
Vω = и = kuω. (2)
Сигналы датчика 6 регулируемого параметра воспринимаются исполнительным устройством 4 через усилитель (например, трансформатор) или непосредственно.
В зависимости от напряжения и, поступающего на обмотки, электромагнит 4 вырабатывает силу Тэм притяжения.
Для выбранной конструкции электромагнита kм=(0,4πω)2/(8πR²мSм)= const, поэтому Тэм = kмI2. Так как I = u/Rм, то в соответствии с выражением (2) поддерживающая сила регулятора
Тэм = Аэмω2, (3)
где Аэм=kм∙ k²м /R²м
Сердечник электромагнита 4 непосредственно связан с пружиной 2, усилие которой Fnp = Е представляет собой восстанавливающую силу регулятора. Поэтому условие статического равновесия сердечника имеет вид
Е — Аэмω2 = 0 (4)
Так как Е = Е0 + bz, где Е0 — усилие предварительной деформации пружины 2 и b — ее жесткость, то с учетом формулы (4) зависимость
z = Аэмω²/b - Е0/b (5)
Дает статическую характеристику 1 (Рисунок 3).
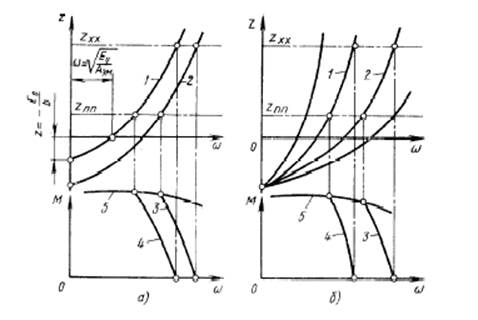
Рисунок 3 Формирование скоростных характеристик электрического регулятора и двигателя с настройкой:
а — механической; б — электрической; 1,2 — характеристики регулятора; 3, 4 — двигателя (регуляторные); 5 — внешняя двигателя
Регулятор с такой характеристикой может быть всережимным, если с помощью задатчика 1 (см. рис. 2) изменять предварительную деформацию пружины 2. По мере увеличения Е0 характеристики смещаются вправо (рис. 3, а). Статические характеристики (1, 2 и др.) соответствуют регуляторным характеристикам двигателя 3, 4 и др.
Всережимность регулятора может быть обеспечена также воздействием на электрические параметры исполнительного устройства.
Путем установления на электромагните ползунка 3 (см. рис. 2) можно изменять RM. Чем меньше Ra, тем больше Аэм и круче статическая характеристика z = f (ω).
На рис. 3, а и б горизонталь zxx соответствует холостому ходу, a znn — полной подаче топлива, т. е. внешней характеристике 5 двигателя.
ФОРСУНКИ С ЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ
Применение на двигателях электрических регуляторов дает возможность отказаться от традиционного для дизелей управляющего воздействия через рейку топливного насоса высокого давления и перевести это воздействие непосредственно на топливную форсунку. В таких системах функции дозирования и фазирования реализуются форсунками, а на топливный насос возлагается задача поддержания в аккумуляторе необходимого давления топлива (аккумуляторная система впрыска).

Рисунок 4 Электромагнитные форсунки с воздействием:
а — на нглу; б — на клапан; 1 — игла; 2 — пружина; 3 — электромагнит; 4 — клапан
Форсунка с электрическим управлением (рис. 4) преобразует электрический импульс, сформированный регулятором, в гидравлический импульс впрыска топлива в цилиндры. На рис. 4, а показана конструктивная схема форсунки, игла 1 которой прижимается к седлу пружиной 2. Подъем иглы и впрыск топлива осуществляются электромагнитом 3, к работе которого предъявляются весьма высокие требования. Так, срабатывание и отпускание магнита должно укладываться в пределы от 0,1 до 1 мс при ходе иглы от 0,2 до 0,5 мм и запирающем усилии около 50 Н. Электромагниты — устройства инерционные: сила тока нарастает и спадает в них по экспоненте.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.