где bi ³ 0; xj ³ 0 (i =
![]() ; j =
; j = ![]() ).
).
При этом начальный
опорный план имеет вид : ![]()
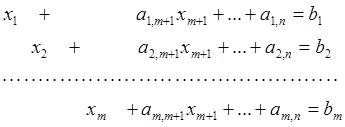
Выразим базисные переменные х1, х1,…, хm через свободные переменные хm+1, хm+2,…, хn.
|
Выражения для свободных переменных |
Коэффициенты целевой функции |
|
x1 = b1 - a1,m+1- … - a1,nxn |
c1 |
|
x2 = b2 - a2,m+1- … - a2,nxn |
c2 |
|
……………………………… |
… |
|
xm = bm - am,m+1- … - am,nxn |
cm |
|
xm+1 |
cm+1 |
|
… |
… |
|
xn |
cn |
Подставим выражения для свободных переменных в целевую функцию z и сгруппируем подобные члены
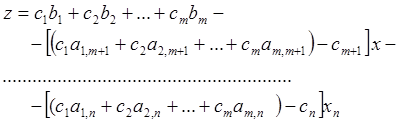
Перепишем полученное выражение так:
![]() ,
(6.5)
,
(6.5)
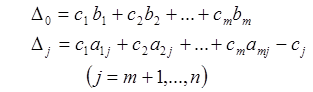
где
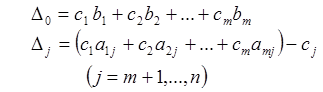
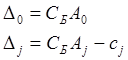
Другая, векторная форма записи этих же выражений
Чтобы опорный план ![]() был
оптимальным, иными словами - чтобы при
был
оптимальным, иными словами - чтобы при ![]() целевая функция z
имела максимум, все
целевая функция z
имела максимум, все ![]() должны быть неотрицательными. Действительно,
если в выражении (6.5) все D j≥ 0, а xm+1=0,
xm+2=0,…, xn = 0, то
целевая функция z имеет максимум, поскольку любое увеличение xj (j
> m) уменьшит значение z.
должны быть неотрицательными. Действительно,
если в выражении (6.5) все D j≥ 0, а xm+1=0,
xm+2=0,…, xn = 0, то
целевая функция z имеет максимум, поскольку любое увеличение xj (j
> m) уменьшит значение z.
При этом ![]() .
.
Аналогично, для того чтобы целевая функция z
имела минимум, все ![]() должны быть неположительными.
должны быть неположительными.
Итак, признаки оптимальности опорного плана: для max z - все Dj неотрицательны;
для min z - все Dj неположительны.
Исходные данные ЗЛП и результаты вычислений, реализующих симплексный метод, удобно размещать в виде таблицы, которую для краткости будем называть симплексной таблицей. Ниже приведена схема симплекс-таблицы.
|
БП |
cБ |
А0 |
х1 |
х2 |
… |
xm |
xm +1 |
… |
xn |
|
с1 |
с2 |
… |
cm |
cm+1 |
… |
сn |
|||
|
x1 |
с1 |
b 1 |
1 |
0 |
… |
0 |
а1,m+1 |
… |
a1,n |
|
х2 |
с2 |
b 2 |
0 |
1 |
… |
0 |
а2,m+1 |
… |
a2,n |
|
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
|
xm |
cm |
b m |
0 |
0 |
… |
1 |
am,m+1 |
… |
am,n |
|
Dj |
∆0 |
0 |
0 |
… |
0 |
∆m+1 |
… |
∆n |
|
В схеме использованы следующие обозначения.
БП – базисные переменные;
сБ – коэффициенты целевой функции при базисных переменных;
А0 – свободные члены ограничений - значения базисных переменных;
сj и аi,j – коэффициенты целевой функции и ограничений;
zj![]() - индексная строка, в
которой: D0 = сБА0 (скалярное произведение, которое равно значению
целевой функции, т.к. свободные переменные равны нулю) и Dj
= сБА j - cj.
- индексная строка, в
которой: D0 = сБА0 (скалярное произведение, которое равно значению
целевой функции, т.к. свободные переменные равны нулю) и Dj
= сБА j - cj.
Если в индексной строке m элементов равны нулю,
а остальные неотрицательны, то оптимальный план для max z
имеет вид: ![]()
Если в индексной строке m элементов равны нулю, а остальные неположительные то это оптимальный план для min z.
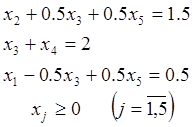
Пример: Решить ЗЛП
Min z = 2x1-x2+3x3-2x4+1,5x5
|
БП |
cБ |
А0 |
х1 |
х2 |
х3 |
х4 |
х5 |
|
2 |
-1 |
3 |
-2 |
1,5 |
|||
|
x2 x4 x1 |
-1 -2 2 |
1,5 2 0,5 |
0 0 1 |
1 0 0 |
0,5 1 -0,5 |
0 1 0 |
0,5 0 0,5 |
|
∆j |
-4,5 |
0 |
0 |
-6,5 |
0 |
-1 |
|
Все оценки индексной строки неположительны. Значит, план (см. столбец А0).
![]()
является оптимальным.
Целевая функция достигает значения.
![]()
Положим, что задача линейного программирования представлена в предпочтительном виде:
![]() ;
;
 (6.6)
(6.6)
где bi ³ 0; xj ³ 0 (i =
![]() ; j =
; j = ![]() ).
).
Следовательно, начальный опорный план имеет следующий вид : ![]()
В разделе 6.3 целевая функция была выражена через свободные переменные с помощью формулы:
![]() ,
(6.7)
,
(6.7)
где
причем D j - числа индексной строки симплекс-таблицы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.