

5.СИНТЕЗ КУЛАЧКОВЫХ МЕХАНИЗМОВ.
Задача синтеза механизма решается в следующем порядке:
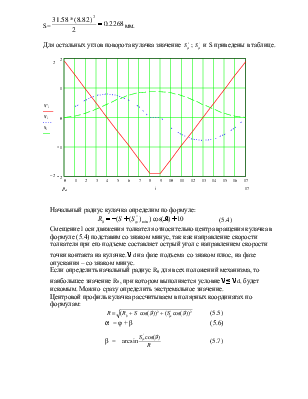
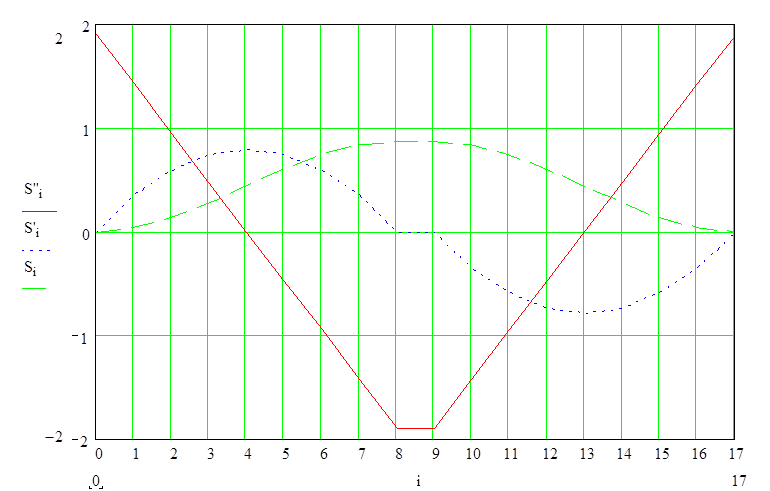
Интегрированием выражения аналога ускорения выходного звена находятся зависимости аналога скорости и перемещения в функции угла поворота кулачка.
Из условия ограничения угла давления или обеспечения выпуклости профиля кулачка определяются основные размеры кулачкового механизма.
Рассчитываются полярные
координаты центрового профиля (R,a) и профиля кулачка (Rn, ![]() ).
).
Исходными данными для решения задачи являются структурная схема кулачкового механизма и параметры.
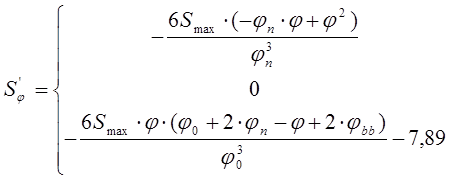
В выражение аналога ускорения толкателя подставляем исходные данные
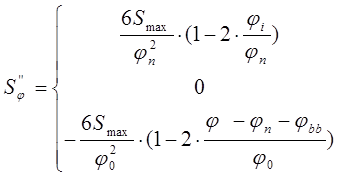
![]()
 (5.1)
(5.1)
Проинтегрировав уравнения (5.1) получим выражение для определения аналога скорости и перемещения толкателя.
![]() (5.2)
(5.2)
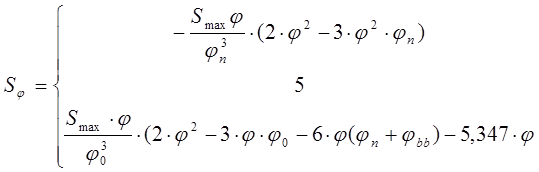
![]() (5.3)
(5.3)
Постоянные интегрирования
определялись из следующих начальных условий: при j=0, ![]() =0, S=5 мм. Углы поворота
кулачка, соответствующие подъему и опусканию толкателя делим на восемь равных
частей
=0, S=5 мм. Углы поворота
кулачка, соответствующие подъему и опусканию толкателя делим на восемь равных
частей мм;
мм;
![]() мм;
мм;
S= мм.
мм.
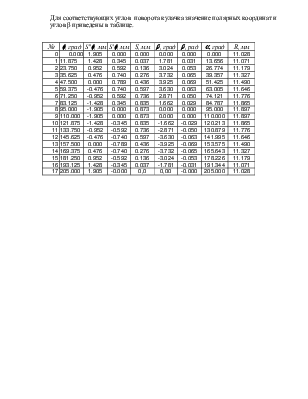
Для остальных углов поворота
кулачка значение ![]() ;
; ![]() и S приведены в таблице.
и S приведены в таблице.
Начальный радиус кулачка определим по формуле:
![]() (5.4)
(5.4)
Смещение l оси движения толкателя относительно центра вращения кулачка в формуле (5.4) подставим со знаком минус, так как направление скорости толкателя при его подъеме составляет острый угол с направлением скорости точки контакта на кулачке. νd на фазе подъема со знаком плюс, на фазе опускания – со знаком минус.
Если определить начальный радиус R0 для всех положений механизма, то наибольшее значение R0, при котором выполняется условие ν≤ νd, будет искомым. Можно сразу определить экстремальное значение.
Центровой профиль кулачка рассчитываем в полярных координатах по формулам:
![]() (5.5)
(5.5)
α = φ + β (5.6)
β![]() =
= ![]() arcsin
arcsin (5.7)
(5.7)
Для соответствующих углов поворота кулачка значение полярных координат и углов β приведены в таблице.
|
№ |
f, град |
S''f, мм |
S'f, мм |
S, мм |
b, град |
b, рад |
a, град |
R, мм |
|
0 |
0.000 |
1.905 |
0.000 |
0.000 |
0.000 |
0.000 |
0.000 |
11.028 |
|
1 |
11.875 |
1.428 |
0.345 |
0.037 |
1.781 |
0.031 |
13.656 |
11.071 |
|
2 |
23.750 |
0.952 |
0.592 |
0.136 |
3.024 |
0.053 |
26.774 |
11.179 |
|
3 |
35.625 |
0.476 |
0.740 |
0.276 |
3.732 |
0.065 |
39.357 |
11.327 |
|
4 |
47.500 |
0.000 |
0.789 |
0.436 |
3.925 |
0.069 |
51.425 |
11.490 |
|
5 |
59.375 |
-0.476 |
0.740 |
0.597 |
3.630 |
0.063 |
63.005 |
11.646 |
|
6 |
71.250 |
-0.952 |
0.592 |
0.736 |
2.871 |
0.050 |
74.121 |
11.776 |
|
7 |
83.125 |
-1.428 |
0.345 |
0.835 |
1.662 |
0.029 |
84.787 |
11.865 |
|
8 |
95.000 |
-1.905 |
0.000 |
0.873 |
0.000 |
0.000 |
95.000 |
11.897 |
|
9 |
110.000 |
-1.905 |
0.000 |
0.873 |
0.000 |
0.000 |
110.000 |
11.897 |
|
10 |
121.875 |
-1.428 |
-0.345 |
0.835 |
-1.662 |
-0.029 |
120.213 |
11.865 |
|
11 |
133.750 |
-0.952 |
-0.592 |
0.736 |
-2.871 |
-0.050 |
130.879 |
11.776 |
|
12 |
145.625 |
-0.476 |
-0.740 |
0.597 |
-3.630 |
-0.063 |
141.995 |
11.646 |
|
13 |
157.500 |
0.000 |
-0.789 |
0.436 |
-3.925 |
-0.069 |
153.575 |
11.490 |
|
14 |
169.375 |
0.476 |
-0.740 |
0.276 |
-3.732 |
-0.065 |
165.643 |
11.327 |
|
15 |
181.250 |
0.952 |
-0.592 |
0.136 |
-3.024 |
-0.053 |
178.226 |
11.179 |
|
16 |
193.125 |
1.428 |
-0.345 |
0.037 |
-1.781 |
-0.031 |
191.344 |
11.071 |
|
17 |
205.000 |
1.905 |
-0.000 |
0,0 |
0,00 |
-0.000 |
205.000 |
11.028 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.