Найдем параметры для моделирования двигателя СЛ-621L(НЕ ВЕРНОЕ ОФОРМЛЕНИЕ)
 (навыки округления
остались в школе)
(навыки округления
остались в школе)
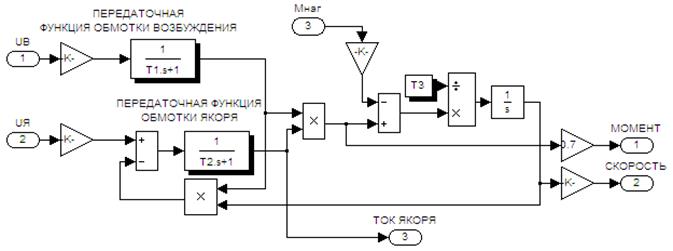
Рис.7. Блок-диаграмма ДПТ независимого возбуждения
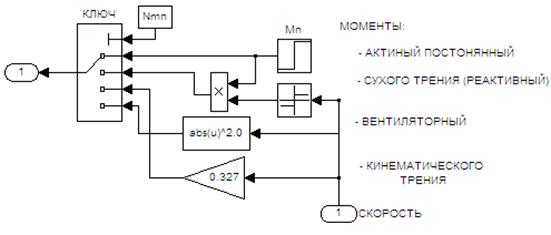
Рис.8. Блок-диаграмма реализации нагрузочного момента
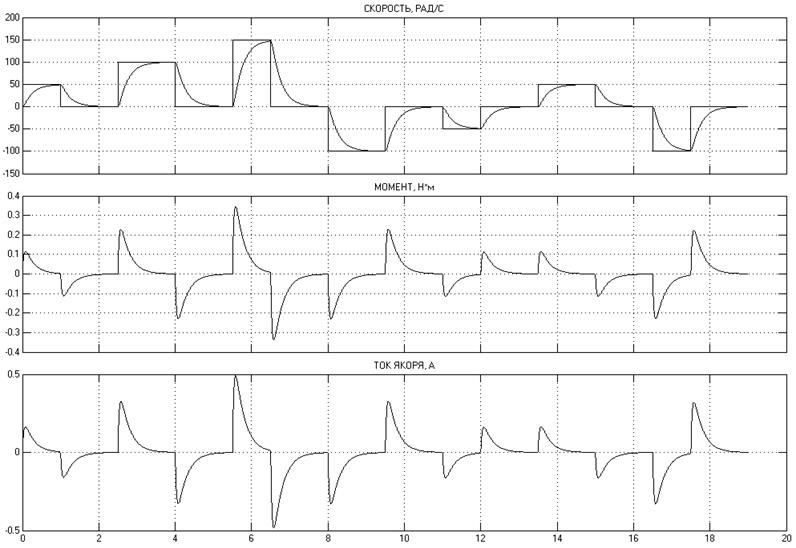
Рис.9. Результаты моделирования разомкнутой системы без нагрузочного момента
(Перепетум – мобиле: ток равен нулю, а работает!)
ДПТ (с абревиатуры предложение не начинают!) без системы регулирования, не может работать при нагрузке Мнаг=0.35 Н*м, поскольку двигатель не сможет развить заданную скорость. (ПОДСТАВИТЬ величину напряжения надо! Лучше бы задумались о форме реализуемой тахограммы , глядя на переходные процессы при пуске и останове). Используем систему стабилизации скорости вращения на базе УМ (не представлено).
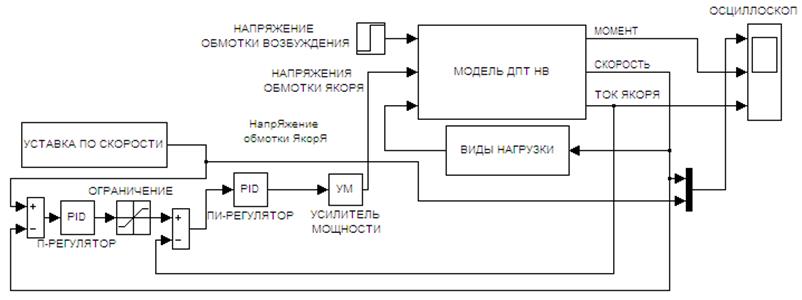
Рис.10. Функциональная модель системы регулирования
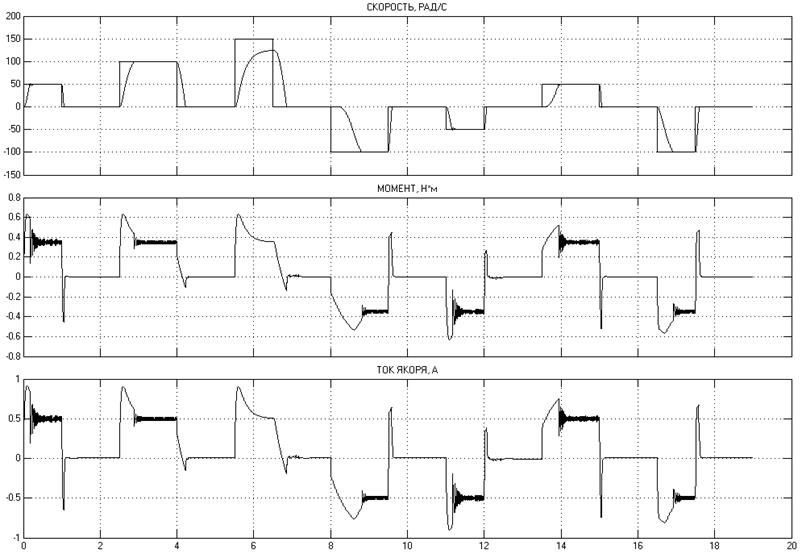
Рис. 11. Результаты моделирования
Какая ошибка при обеспечении максимальной скорости! А как долго разгон выполняется!
БЕЗОБРАЗНО ВЫПОЛНЕНА НАСТРОЙКА РЕГУЛЯТОРОВ.
Не приведены расчеты!!!
Введем в систему широтно-импульсный преобразователь согласно структурной схеме, которая приведена на рис.9. (ЭТО НАДО ИМЕТЬ ВВИДУ С САМОГО НАЧАЛА, ИНАЧЕ В ПРАКТИКЕ ИСТОЧНИКИ ПИТАНИЯ НЕ ДЕЛАЮТ!)
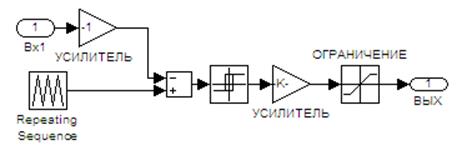
Рис.9. Блок-диаграмма реализации ШИП
РЕАЛЬНО ЭТО НУЖНО КАК ЗАЙЦУ СТОП-СИГНАЛ!
Кроме пульсаций ничего нового
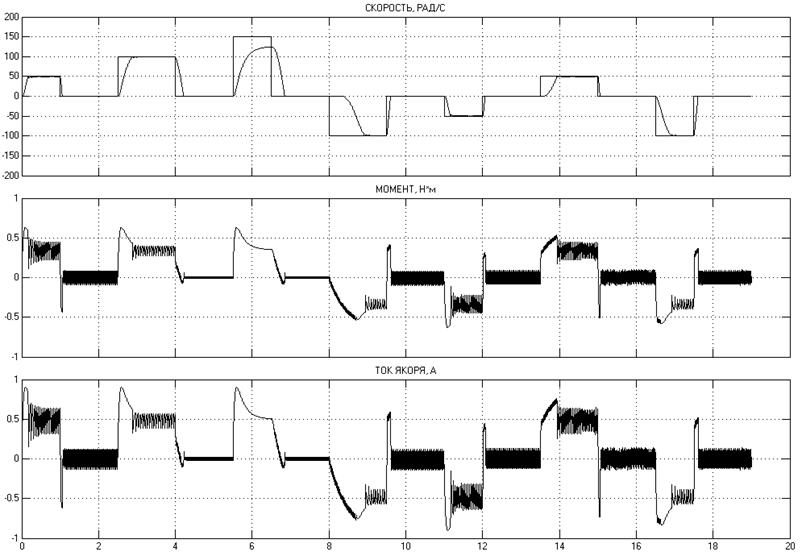
Рис.10. Результаты моделирования с использованием ШИП
(не верно представлено, опять вечный двигатель)
По результатам моделирования можно сделать следующие выводы:
1. Применение ШИП не отразилось на изменении скорости двигателя. При использовании ШИП появились пульсации тока якоря и момента (высокочастотная составляющая) в установившемся режиме, что обусловлено высокой частотой переключения ШИПа. Ток якоря ненамного превышает номинальное значение, в моменты торможения, то нет необходимости вводить дополнительные ограничения.
2. В моменты торможения, ток якоря принимает отрицательные значения и в структурной схеме ШИП не предусмотрено дополнительных сопротивления, которые коммутируются при противовключении двигателя, для гашения кинетической энергии, поэтому такой режим работы будет соответствовать режиму динамического торможения ДПТ.
3. Двигатель при отработке установки скорости вращения равной 150рад/c в момент времени от 5.5 с. до 6.5 с. не достигает нужной скорости, что обьясняется ограничением напряжением якоря Uя=110В, в реализации УМ и ШИП.
НИЧЕГО НЕ ПОНЯТНО В ЧАСТИ ПРЕДЛОЖЕНИЙ ПО РЕАЛИЗАЦИИ ПРИВОДА!
|
Параметр системы |
Значение |
|
Пропорциональная составляющая (контур тока) |
10 |
|
Интегральная составляющая (контур тока) |
10 |
|
Дифференциальная составляющая (контур тока) |
- |
|
Пропорциональная составляющая (контур скорости) |
10 |
|
Интегральная составляющая (контур скорости) |
- |
|
Дифференциальная составляющая (контур скорости) |
- |
1. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики: Учеб. для вузов по спец. «Автоматика и телемеханика». – 2-е изд. – М.: Высшая школа, 1986.
2. Герман-Галкин М.И. Моделирование электротехнических устройств в среде MatLab
3. Гультяев А.К. MATLAB 5.3 Имитационное моделирование в среде Windows: Практическое пособие. – Спб.: КОРОНА принт, 2001. – 400 с.
Хорошо бы увидеть ссылки на источники по тексту ПЗ
При надлежащем оформлении хватило бы и 8 листов без приложения
А нужен ли редуктор, да еще с таким низким КПД, из ПЗ никак не ясно.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.