


Министерство Образования и Науки Российской Федерации
Федеральное агентство по образованию
НГТУ
Кафедра автоматики
Лабораторная работа №1
«ДАТЧИКИ УГЛОВОГО ПОЛОЖЕНИЯ НА ОСНОВЕ ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА»
Факультет АВТ
Группа АА-36
Студенты: Преподаватель:
Белявский А.С. Русаков О.П.
Драгун А.А.
Чернышов В.С.
Дата выполнения:
Отметка о защите:
НОВОСИБИРСК 2006
Цель работы:
Изучить работу вращающегося трансформатора и основные схемы его включения. Освоить алгоритмическую и аппаратную реализацию основных типов датчиков углового положения на основе ВТ.
Вращающийся трансформатор является электрической микромашиной, используемой в качестве первичного преобразователя датчиков углового положения или измерителей рассогласования. Наибольшее распространение в устройствах автоматики в настоящее время получили датчики углового положения. При реализации последних ВТ используется в качестве электромашинных фазовращателей (ЭМФ) и синус-косинусных преобразователей.
Различают ЭМФ с вращающимся магнитным полем и с пульсирующим магнитным полем. В первом случае обмотки статора ВТ, имеющие сдвинутые на 90 магнитные оси, запитывают от двух источников напряжения
![]()
В зазоре ВТ образуется вращающееся магнитное поле, пронизывающее обмотки ротора, в которых индуцируется ЭДС
 (1)
(1)
Фазовый сдвиг ЭДС пропорционален углу сдвига магнитных осей обмоток статора и ротора γ
 , где p –
число пар полюсов ВТ.
, где p –
число пар полюсов ВТ.
Используя электронные преобразователи фаза – напряжение или фаза – код совместно с ЭМФ, нетрудно реализовать датчик углового положения с линейной статической характеристикой.
ЭМФ с пульсирующем полем отличается от ЭМФ с вращающимся полет тем, что ЭДС вида (3) получают на выходе суммирующего усилителя. Вход усилителя подключен к первой обмотке ротора непосредственно, ко второй - через фазосдвигающую цепочку (цепочка реализует фазовый сдвиг в 90 ). В этих обмотках индуцируется ЭДС вида
 (2)
(2)
При суммировании, получим на выходе усилителя сигнал, который подобен сигналу (1)
![]() (3)
(3)
При необходимости ВТ может быть включен по схеме синус – косинусного преобразователя. При этом в зазоре машины создается пульсирующее магнитное поле, индуцирующее в обмотках ротора ЭДС(2). Из(2) видно, что эта ЭДС функциональна связана с углом поворота ротора Вт и модулирована сигналом γ(t). Для использования этой схемы в качестве датчика поворота необходимо ее дополнить демодулятором, роль которого может выполнять фазочувствительный усилитель.
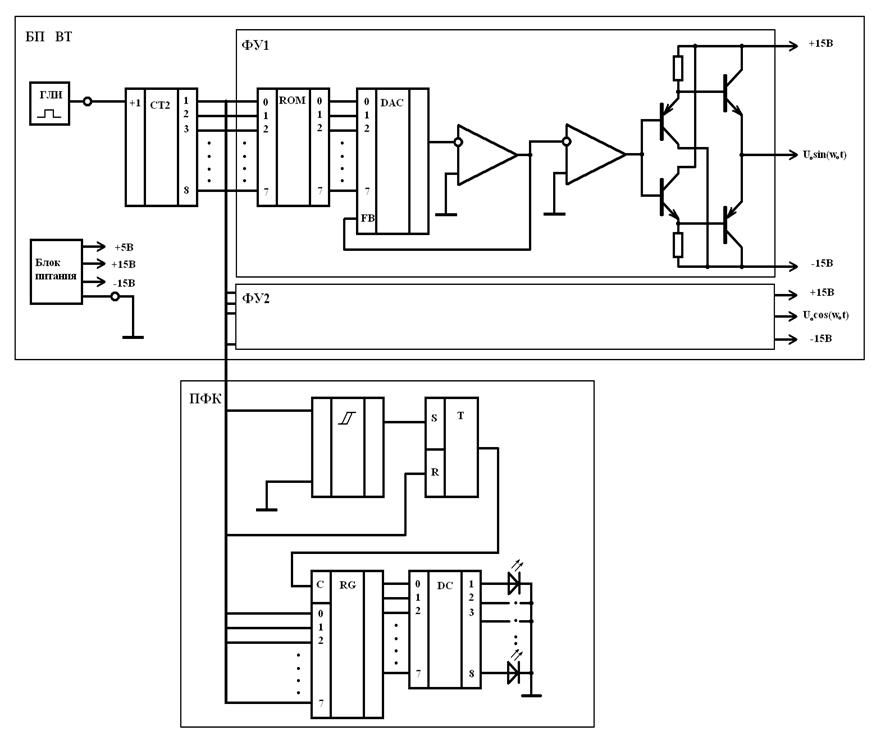
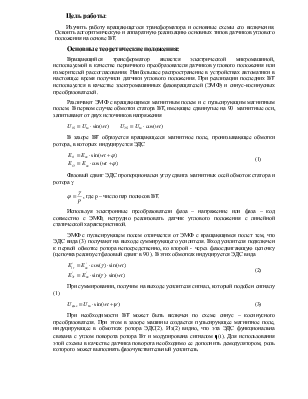
Рис.1 Функциональная схема стенда.
Выполнение:
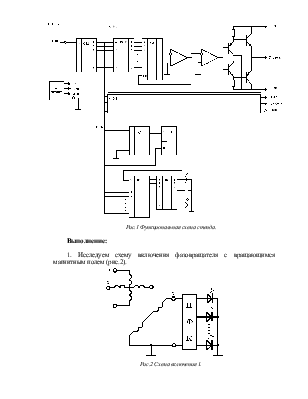
1. Исследуем схему включения фазовращателя с вращающимся магнитным полем (рис.2).
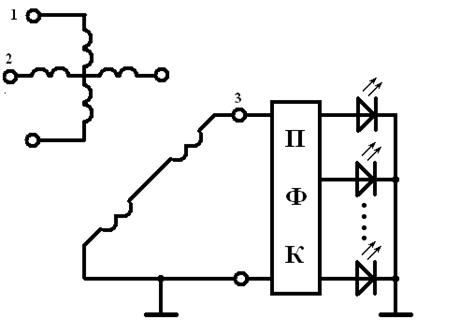
Рис.2 Схема включения 1.
Осциллограммы в выведенных точках схемы:
Осциллограмма питающего напряжения 1-ой обмотки статора (вывод 1).
Осциллограмма питающего напряжения 2-ой обмотки статора (вывод 2).
Осциллограмма выходного напряжения ротора (вывод 3).
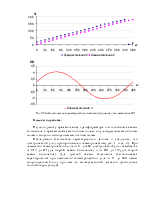
Статическая характеристика датчика приведена в таб. 1 и отражена на графике (рис.5).
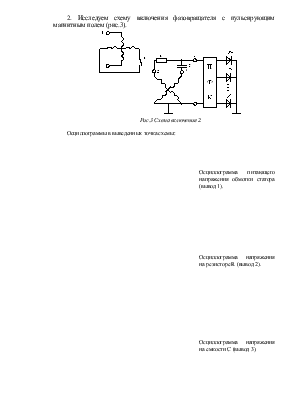
2. Исследуем схему включения фазовращателя с пульсирующим магнитным полем (рис.3).
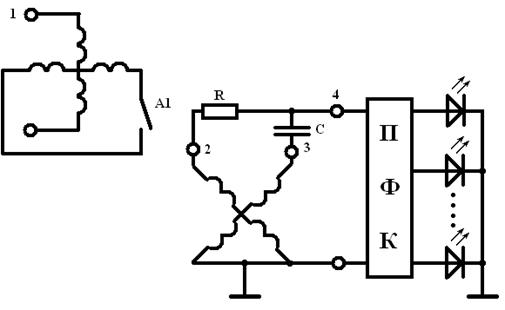
Рис.3 Схема включения 2.
Осциллограммы в выведенных точка схемы:
Осциллограмма питающего напряжения обмотки статора (вывод 1).
Осциллограмма напряжения на резисторе R (вывод 2).
Осциллограмма напряжения на емкости С (вывод 3).
Осциллограмма выходного напряжения схемы (вывод 4).
Статическая характеристика датчика приведена в таб. 1 и отражена на графике (рис.5).
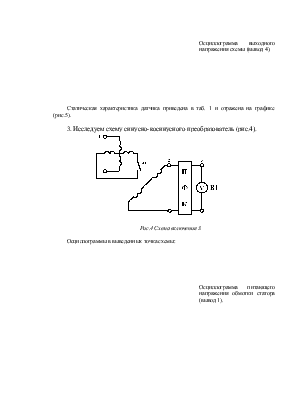
3. Исследуем схему синусно-косинусного преобразователь (рис.4).
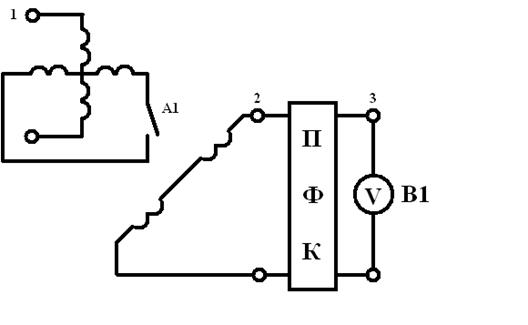
Рис.4 Схема включения 3.
Осциллограммы в выведенных точка схемы:
Осциллограмма питающего напряжения обмотки статора (вывод 1).
Осциллограмма выходного напряжения ротора (вывод 2).
Осциллограмма выходного напряжения схемы (вывод 3).
Статическая характеристика датчика приведена в таб. 1 и отражена на графике (рис.5). Таблица 1
|
Геометрический угол, |
Электрический угол, N |
||
|
Схема 1 |
Схема 2 |
Схема 3 |
|
|
0 |
019 |
001 |
0,29 |
|
15 |
027 |
011 |
0,55 |
|
30 |
033 |
019 |
0,79 |
|
45 |
041 |
025 |
0,96 |
|
60 |
049 |
033 |
1 |
|
75 |
057 |
041 |
1 |
|
90 |
065 |
049 |
1 |
|
105 |
071 |
057 |
0,94 |
|
120 |
077 |
065 |
0,77 |
|
135 |
085 |
071 |
0,54 |
|
150 |
091 |
077 |
0,28 |
|
165 |
099 |
085 |
0 |
|
180 |
107 |
091 |
-0,31 |
|
195 |
115 |
099 |
-0,56 |
|
210 |
123 |
107 |
-0,79 |
|
225 |
131 |
115 |
-0,94 |
|
240 |
139 |
123 |
-1 |
|
255 |
147 |
131 |
-1 |
|
270 |
153 |
139 |
-1 |
|
285 |
161 |
147 |
-0,94 |
|
300 |
167 |
153 |
-0,79 |
|
315 |
173 |
161 |
-0,56 |
|
330 |
179 |
167 |
-0,3 |
|
345 |
001 |
173 |
0 |
|
360 |
011 |
179 |
0,26 |
Рис.5 Статистические характеристики датчика для разных схем включения ВТ.
Выводы по работе:
Изучили работу вращающегося трансформатора и его основные схемы включения: с вращающимся магнитным полем, с пульсирующим магнитным полем и синусно-косинусным магнитным полем.
Исследовали статические характеристики датчика и убедились, что электрический угол пропорционален геометрическому (сх. 1 и сх. 2). При изменении геометрического угла от 0 до 360 электрический угол изменяется от 019 до 011(для первой схемы включения) и от 001 до 179(для второй схемы включения). Для третьей схемы включения статистическая характеристика при изменении геометрического угла от 0 до 360 имеет синусоидальный вид, при чем на вышеуказанный диапазон приходиться полный период синуса.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.