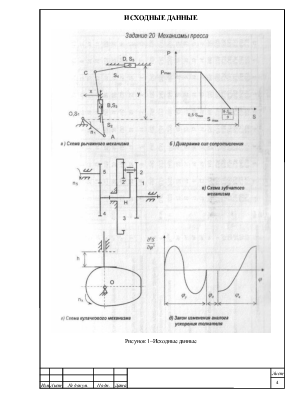



























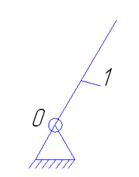
ИСХОДНЫЕ ДАННЫЕ
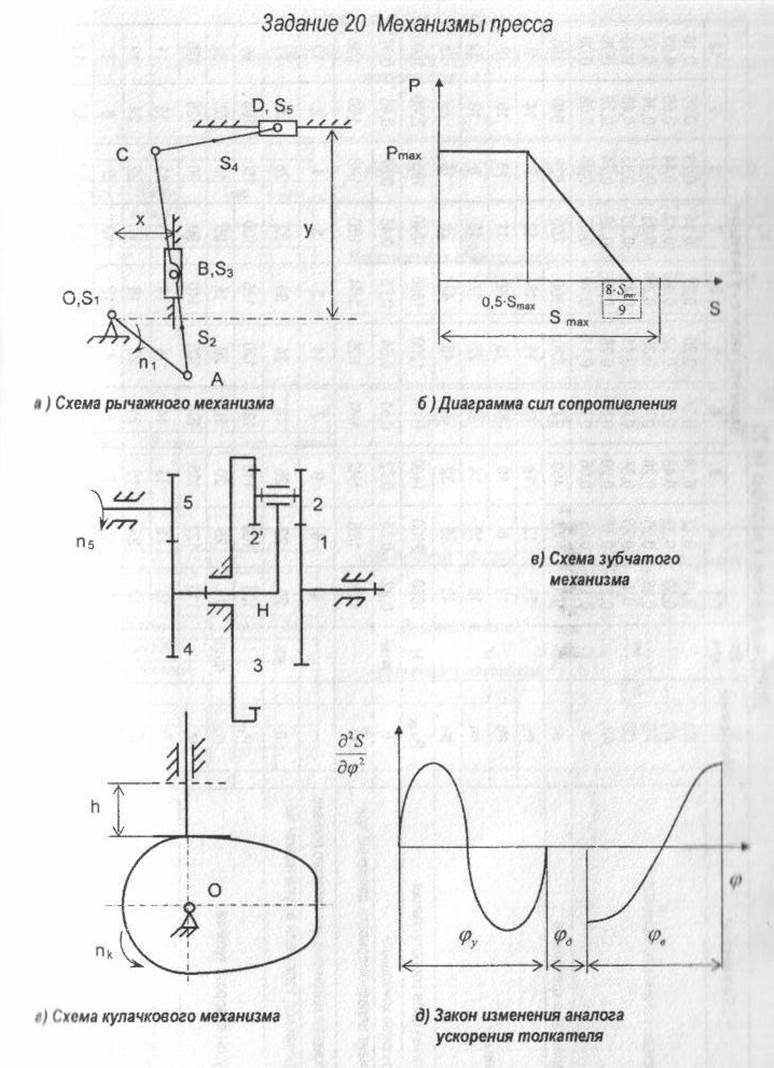
Рисунок 1–Исходные данные
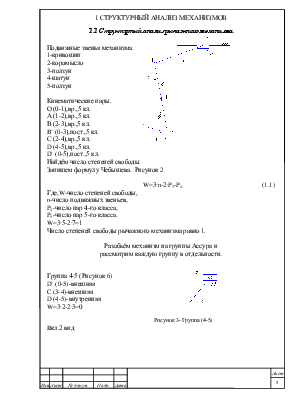
1 СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ
Подвижные звенья механизма.
1-кривошип
2-коромысло
3-ползун
4-шатун
5-ползун
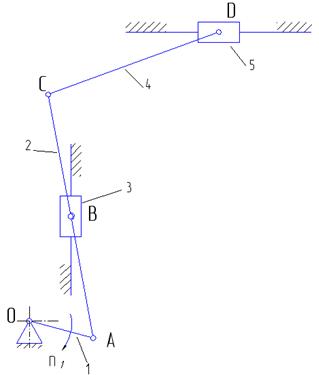
Кинематические пары.
О (0-1),вр.,5 кл.
А (1-2),вр.,5 кл.
В (2-3),вр.,5 кл.
B` (0-3),пост.,5 кл.
С (2-4),вр.,5 кл.
D (4-5),вр.,5 кл.
D` (0-5),пост.,5 кл.
Найдём число степеней свободы.
Запишем формулу Чебышева. Рисунок 2
W=3∙n-2∙P5-P4 (1.1)
Где,W-число степеней свободы,
n-число подвижных звеньев,
P4-число пар 4-го класса,
P5-число пар 5-го класса.
W=3∙5-2∙7=1
Число степеней свободы рычажного механизма равно 1.
Разобьём механизм на группы Ассура и
рассмотрим каждую группу в отдельности.
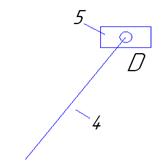
Группа 4-5 (Рисунок 6)
D` (0-5)-внешняя
C (3-4)-внешняя
D (4-5)-внутренняя
W=3∙2-2∙3=0
Рисунок 3- Группа (4-5)
IIкл.2 вид
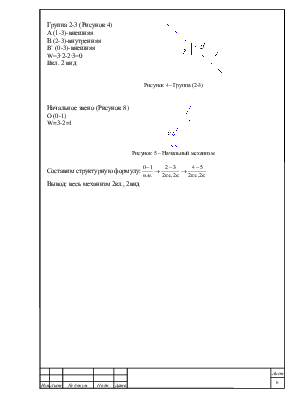
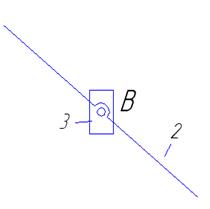 Группа 2-3 (Рисунок
4)
Группа 2-3 (Рисунок
4)
А (1-3)-внешняя
В (2-3)-внутренняя
B` (0-3)-внешняя
W=3∙2-2∙3=0
IIкл. 2 вид
Рисунок 4– Группа (2-3)
Начальное звено (Рисунок 8)
O (0-1)
W=3-2=1
Рисунок 5 – Начальный механизм
Составим структурную формулу: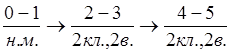
Вывод: весь механизм 2кл., 2вид
Для заданной схемы механизма строим 12 положений.
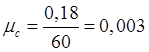
Определяем масштабный коэффициент построения механизма:
 (2.1)
(2.1)
где,![]() -
масштабный коэффициент,
-
масштабный коэффициент, ![]()
![]() - длина
звена,
- длина
звена, ![]()
![]() - длина
звена на чертеже,
- длина
звена на чертеже, ![]()
![]()
Запишем длинны звеньев механизма на чертеже
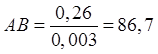
![]()
![]()
![]()
![]()
![]()
Приступаем к построению повёрнутых планов скоростей для каждого положения. Рассмотрим пример построения для положения №9:
У кривошипа определяем скорость точки А
![]() (2.2)
(2.2)
где,![]() -
длина звена,
-
длина звена, ![]()
![]() -
угловая скорость кривошипа,
-
угловая скорость кривошипа, ![]()
![]()
![]()
![]()
Для построения вектора скорости точки А определяем масштабный коэффициент
 (2.3)
(2.3)
где,![]() -
скорость точки А,
-
скорость точки А, ![]()
![]() -
вектор скорости точки А,
-
вектор скорости точки А, ![]()
![]() -
полюс, выбираемый произвольно
-
полюс, выбираемый произвольно
![]()
Для определения скорости точки B запишем систему уравнений:
 (2.4)
(2.4)
Вектор скорости точки А – VA известен по величине и по направлению. Известна линия действия
вектора скорости точки B – VBB`.ТочкаB`
лежит на неподвижной направляющей, по которой движется ползун(![]() ). Линия действия VBB`
направлена вдоль неподвижной
направляющей.
). Линия действия VBB`
направлена вдоль неподвижной
направляющей.
Вектор скорости VBA не известен ни по величине, ни по направлению, но нам известна его линиядействия, она перпендикулярна звену AB (на повернутом плане скоростей она будет параллельна звену AB), и проходит через точку a. На пересечении линии действия VBAс линией действия вектора скорости VBB` получим точку b. Соединив, полученную точку с полюсом p найдём длину вектора скорости точки B.
![]()
![]()
Так как центр массы 3-го звена совпадает точкой B то,
![]()
![]()
Для определения скорости центра масс 2-го звена S2 воспользуемся соотношением:
 (2.5)
(2.5)
где,![]() ,
,
![]() - расстояния между соответствующими точками
на механизме, м
- расстояния между соответствующими точками
на механизме, м
![]() ,
, ![]() - длинны векторов скоростей на плане, мм
- длинны векторов скоростей на плане, мм
 мм
мм
Соединив, точку ![]() и p получим
скорость центра масс второго звена.
и p получим
скорость центра масс второго звена.
![]()
![]()
Запишем систему уравнений для определения скорости точки C:
Линия действия векторов VCAи VCBизвестна. На повернутом плане скоростей она проходит параллельно звену AC.Вектор скорости VCA равен сумме векторов VABиVBС.Вектор скоростиVBCпо величине и направлениюпропорционально равен вектору скорости VAB, исходя из того, что точки A,B,C находятся на одном звене. Отложив из точки b вектор VBC, получим точку c. Соединивполученную точку с полюсом p найдём длину вектора скорости точки C.
 мм
мм
![]()
![]()
Для определения скорости
точки D запишем следующую систему
уравнений:  (2.6)
(2.6)
Вектор скорости точки С– VС известен по величине и по направлению. Известна
линия действия вектора скорости точки D – VDD`. Точка D` лежит на неподвижной направляющей, по которой
движется ползун(![]() ). Линия действия VDD` направлена
вдоль неподвижной направляющей. Вектор скорости VDC
не известен ни по величине, ни по направлению, но нам известна его линия
действия, она перпендикулярна звену CD (на повернутом плане скоростей
она будет параллельна звену CD), и проходит через точку c. На
пересечении линии действия VDC с линией действия вектора скорости VDD` получим
точку d. Соединив, полученную точку с полюсом p
найдём длину вектора скорости точки D.
). Линия действия VDD` направлена
вдоль неподвижной направляющей. Вектор скорости VDC
не известен ни по величине, ни по направлению, но нам известна его линия
действия, она перпендикулярна звену CD (на повернутом плане скоростей
она будет параллельна звену CD), и проходит через точку c. На
пересечении линии действия VDC с линией действия вектора скорости VDD` получим
точку d. Соединив, полученную точку с полюсом p
найдём длину вектора скорости точки D.
![]()
![]()
Для определения скорости центра масс 4-го звена S4 воспользуемся соотношением:
 (2.7)
(2.7)
где,![]() ,
,
![]() - расстояния между соответствующими точками
на механизме, м
- расстояния между соответствующими точками
на механизме, м
![]() ,
, ![]() - длинны векторов скоростей на плане, мм
- длинны векторов скоростей на плане, мм
 мм
мм
![]()
![]()
Так как центр массы 5-го звена совпадает точкой D то,
![]()
![]()
(2.8)
Определим значения угловых скоростей звеньев.
![]()
![]()
Скорости точек остальных положений определяются аналогичным образом.
Все значения сводим в таблицу(1).
Таблица 1 – Значения линейных и угловых скоростей
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.