|
|
|
|
|
|
|
|
Iпр |
|
|
1 |
0,72 |
0,093 |
0,176 |
0,037 |
0,085 |
0,034 |
0,000 |
1,144 |
|
2 |
0,499 |
0,091 |
0,300 |
0,144 |
0,122 |
0,422 |
2,298 |
|
|
3 |
0,659 |
0,017 |
0,392 |
0,170 |
0,081 |
0,127 |
2,166 |
|
|
4 |
0,398 |
0,027 |
0,201 |
0,102 |
0,021 |
0,177 |
1,645 |
|
|
5 |
0,176 |
0,121 |
0,073 |
0,206 |
0,005 |
0,472 |
1,774 |
|
|
6 |
0,072 |
0,194 |
0,027 |
0,328 |
0,006 |
0,727 |
2,074 |
|
|
7 |
0,030 |
0,225 |
0,009 |
0,300 |
0,015 |
0,546 |
1,843 |
|
|
8 |
0,033 |
0,197 |
0,000 |
0,144 |
0,019 |
0,146 |
1,258 |
|
|
9 |
0,265 |
0,040 |
0,107 |
0,025 |
0,003 |
0,065 |
1,226 |
|
|
10 |
1,184 |
0,101 |
0,805 |
0,525 |
0,200 |
0,042 |
3,576 |
|
|
11 |
0,841 |
0,213 |
0,591 |
1,090 |
0,230 |
3,177 |
6,861 |
|
|
12 |
0,161 |
0,219 |
0,103 |
1,179 |
0,129 |
5,368 |
7,878 |
Масштабный коэффициент по оси φ не изменяем.
Масштабный коэффициент по оси моментов:

где μI – масштабный коэффициент по оси приведенных моментов инерции;
![]() – значение
максимального приведенного момента инерции, кг·м2;
– значение
максимального приведенного момента инерции, кг·м2;
![]() – значение
максимального момента сопротивления на графике, мм.
– значение
максимального момента сопротивления на графике, мм.
Строим график приведенных моментов инерции. Значение приведенного момента инерции на графике сносим в таблицу 5.
Таблица 5 – Приведенный момент инерции и его значение на графике
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
|
Iпр, кг·м2 |
1,144 |
2,298 |
2,166 |
1,645 |
1,774 |
2,074 |
1,843 |
1,258 |
1,226 |
3,576 |
6,861 |
7,878 |
|
мм |
17 |
35 |
33 |
25 |
27 |
32 |
28 |
19 |
19 |
54 |
105 |
120 |
2.8 Определение параметров маховика
Строим диаграмму энергия-масса (петля Виттенбауера) на основе графика приведенного момента инерции и графика изменения кинетической энергии, графически исключая ось φ.
К полученной кривой энергия-масса под углами ψminи ψmaxпроводим касательные.



где ψminи ψmax – углы наклона касательных проведенных к петле Виттенбауера, град;
δ – коэффициент неравномерности вращения кривошипа.
Получаем значения углов ψmax=88,47˚; ψmin=88,40˚.
Определяем отрезок aс, который отсекают касательные по оси ΔТ. Так как он полностью не попадает в область графика, находим его длину через отрезок bd.
aс=od·tgψmin-ob·tgψmax=123·35,75-15·37,49=3835мм
Приведенный момент инерции маховика IM:

Определяем диаметр маховика:
где DM – диаметр маховика, м;
ρ – плотность материала маховика, (сталь,ρ=7800 кг/м3);
kb – коэффициент соотношения диаметра и ширины маховика (принимаем kb=0,15).
Определяем ширину маховика b:
b=kb·DM=0,15·1,05=0,16 м
Определяем массу маховика mМ:

где mM – масса маховика, кг.
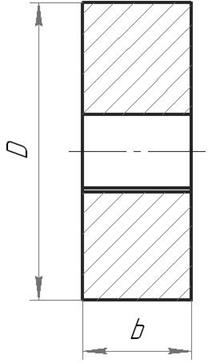
Рисунок 6 - Эскиз маховика
3.1 Построение плана ускорений
Проводим силовой анализ для положения 9 на рабочем ходу.
Ускорение точки О равно нулю (ао=0).
Для определения ускорений точекА и С(аА=аС) разложим ускорение точкиА на нормальную и тангенциальную составляющие:
![]()
где
![]() - полное
ускорение точки А, м/с2;
- полное
ускорение точки А, м/с2;
![]() -
нормальное ускорение точкиА, м/с2;
-
нормальное ускорение точкиА, м/с2;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.