В4 – разворот фрезы
П5 – перемещение суппортной стойки к столу с заготовкой
П6 – перемещение фрезы вдоль своей оси
П7 – перемещение стола с заготовкой к суппортной стойке
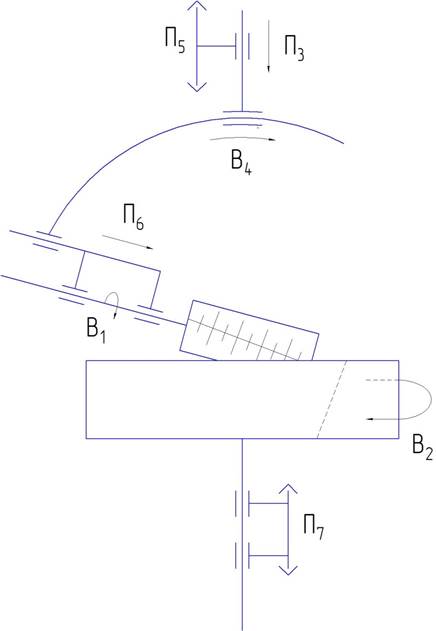
Рисунок 3.1 - Структурная схема компоновки станка
При нарезании на зубофрезерном станке цилиндрических косозубых колёс образующей будет эвольвента, получаемая методом обката (псевдокопирования), а направляющей – винтовая линия, получаемая методом касания (псевдоследа) (Рис. 3.2).
Рисунок 3.2 - Профиль зуба и производящие линии.
Червячную фрезу можно представить как набор зуборезных гребенок, расположенных равномерно по окружности и смещенных относительно друг друга вдоль оси фрезы в соответствии с углом подъема ее винтовой линии. При вращении фрезы зуборезные гребенки пересекают плоскость, содержащую ось фрезы, имитируя на этой плоскости перемещение рейки бесконечной длины, с которой для получения эвольвенты методом обката и согласуется вращение заготовки в сложном движении формообразования ФV (В1; В2). Направляющая винтовая линия при фрезеровании образуется, методом касания. Для её получения необходимо два элементарных движения – вертикальное перемещение фрезы (П3) и дополнительный подворот заготовки (В2). Согласовав данные элементарные движения, получим сложное движение подачи ФS (П3;В2).
Анализ ИД:
ФV (В1; В2). Данное движение совершается с
наибольшей скоростью, следовательно, оно является движением скорости резания.
Движение резания является сложным, поэтому внутренняя связь представляет собой
кинематическую цепь 1 - ![]() F1 - 2 с органом
настройки траектории (F1). Во внешней связи находятся
органы настройки скорости (V1) и направления (N1). Путь и конечная точка не настраиваются, так как
траектории всех элементарных движений, входящих в состав сложного, - замкнуты.
F1 - 2 с органом
настройки траектории (F1). Во внешней связи находятся
органы настройки скорости (V1) и направления (N1). Путь и конечная точка не настраиваются, так как
траектории всех элементарных движений, входящих в состав сложного, - замкнуты.
ФS (П3;В2). Данное движение совершается с меньшей
скоростью, следовательно, оно является движением подачи. Так как данное
движение является сложным, то внутренняя связь представляет собой
кинематическую цепь 5 – R1 – F2
- ![]() F1 – 2 с органом
настройки траектории (F2). Траектория движения не
замкнутая, поэтому во внешней связи настраиваются 4 параметра: скорость (V2), направление (N2), путь (L2) и конечная точка (K2).
F1 – 2 с органом
настройки траектории (F2). Траектория движения не
замкнутая, поэтому во внешней связи настраиваются 4 параметра: скорость (V2), направление (N2), путь (L2) и конечная точка (K2).
Уст (В4) Установочное движение В4 производит разворот суппорта с фрезой для совмещения её витков с зубом нарезаемого колеса, что обеспечивает толщину зуба. Движение является простым, следовательно, траектория обеспечивается внутренней связью, представляющей собой кинематическую пару (круговые направляющие – суппорт). Во внешней связи настраиваются 2 параметра: путь (L3) и конечная точка (K3). Скорость и направление не настраиваются, так как движение осуществляется оператором вручную.
Уст (П5) Установочным движением П5 осуществляется настройка высоты зуба. Движение является простым, следовательно, траектория обеспечивается внутренней связью, представляющей собой кинематическую пару (направляющие – суппортная стойка). Во внешней связи настраиваются 2 параметра: путь (L4) и конечная точка (K4). Скорость и направление не настраиваются, так как движение осуществляется оператором вручную.
Всп (П3) Вспомогательное движение П3 необходимо для быстрого подвода (отвода) фрезы к заготовке в вертикальном направлении. Движение является простым, следовательно, траектория обеспечивается внутренней связью, представляющей собой кинематическую пару (вертикальные направляющие – суппорт). Во внешней связи ЭМ4 – 10 – R2 – N2 – L2 – K2 – R1 – 5 настраивается только направление (N2). Данное движение всегда будет выполняться на максимальной скорости, поэтому орган настройки скорости отсутствует. Путь и конечная точка не настраиваются, так как будут обеспечиваться оператором визуально.
Всп (П5) Вспомогательное движение П5 необходимо для быстрого подвода (отвода) фрезы к заготовке в радиальном направлении. Движение является простым, следовательно, траектория обеспечивается внутренней связью, представляющей собой кинематическую пару (направляющие – суппортная стойка). Во внешней связи ЭМ4 – 10 – R2 – N2 – R3 – 11 – L4 – K4 – 9 настраивается только направление (N2). Данное движение всегда будет выполняться на максимальной скорости, поэтому орган настройки скорости отсутствует. Путь и конечная точка не настраиваются, так как будут обеспечиваться оператором визуально.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.