3.5. КОНТРОЛЬ И ПОВЫШЕНИЕ ДОСТОВЕРНОСТИ ИСХОДНОЙ ИНФОРМАЦИИ
Исходная информация о текущем состоянии объекта управления поступает в УВМ по многим десяткам, а иногда и сотням ИИК. С увеличением их числа возрастает риск попадания в систему недостоверной информации, поэтому одной из важнейших функций первичной обработки информации в АСУТП является контроль ее достоверности.
Недостоверная исходная информация появляется при отказах ИИК, которые делятся на полные и частичные (метрологические). Полный отказ наступает при выходе из строя ИП или повреждении линии связи ИП с УВМ. При частичном отказе технические средства сохраняют работоспособность, однако погрешность измерения соответствующего параметра превышает допустимое значение.
Обнаружение полных отказов ИИК является гораздо более Простой задачей, чем выявление частичных отказов. Поэтому сначала рассмотрим алгоритмы контроля достоверности исходной информации, позволяющие обнаружить только полный отказ ИИК. При этом недостоверное значение параметра должно быть заменено достоверной оценкой, в качестве которой может
|
|
|
|
быть использовано предыдущее достоверное значение этого параметра или его значение, усредненное за некоторый интервал времени, предшествующий моменту обнаружения отказа ИИК Последний способ применяют для наиболее ответственных параметров, например, расходов, значения которых используют при расчете ТЭП
Алгоритм допускового контроля параметра. Он основан на том, что при работе объекта значения
каждого из контролируемых технологических параметров х, не
могут выходить за определенные границы.
![]()
Соответственно при исправном ИИК должен быть ограничен и сигнал измерительной информации у,, поступающий в УВМ по этому каналу:
![]() (3.61)
(3.61)
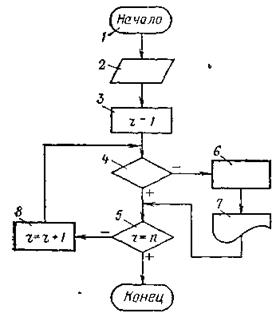
Контроль достоверности по этому алгоритму заключается в проверке выполнения условия (3.61) для каждого значения сигнала измерительной информации, поступившего при очередном опросе ИИК. Блок-схема алгоритма представлена на рис. 3.11. Он работает следующим образом.
После инициации работы алгоритма (блок 1) и ввода исходных данных (блок 2) организуется цикл проверки ИИК, каждому из которых присвоен свой номер r(блок 3), в блоке 4 проверяется условие (3.61), при выполнении которого проверяется условие окончания работы алгоритма (блок 5) Выполнение условия r=п (где п — число контролируемых ИИК) останавливает работу алгоритма Если это условие не выполняется, счетчик номера ИИК увеличивается на 1 (блок 8), и цикл повторяется. Если при проверке в блоке 4 условие (3.61) не выполняется, то в блоке 6 недостоверное значение yr (jt0) заменяется достоверным значением yr[(j—1)t0] того же сигнала, полученным в предыдущем цикле опроса ИИК. Затем на печать выводится сообщение о том, что обнаружен отказ i-того ИИК (блок 7), и работу алгоритма продолжает блок 5.
Этот алгоритм применим не только для стационарных процессов, но и для нестационарных, например периодических. В этом случае граничные значения yi* и yi* в условии (3.61),
являются не константами, а функциями времени, отсчитываемого от начала процесса.
Алгоритм допускового контроля скорости изменения сигнала измерительной информации основан на том, что скорость изменения любого технологического параметра хr ограничена условием
![]() (3.62)
(3.62)
где wс—частота среза функции xt(t), i —среднее значение этой функции
Соответственно должна быть ограничена и скорость изменения сигнала измерительной информации уr(1)
![]() (3.63)
(3.63)
где
n*r
максимально возможное значение ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.