Оглавление
1. Механизм первый. Часть 1. 3
1.1. Введение. 3
1.2. Исходные данные. 3
1.3. Структурный анализ. 4
1.4. Геометрический анализ. 5
1.5. Кинематический анализ. 12
1.6. Сравнение результатов, полученных различными методами. 21
2. Механизм первый. Часть 2. 22
2.1. Введение. 22
2.2. Определение рабочей нагрузки. 22
2.3. Составление уравнений кинетостатики. 23
2.4. Сравнение результатов, полученных различными методами. 29
3. Механизм второй. Часть 1. 30
3.1. Исходные данные. 30
3.2. Структурный анализ. 30
3.3. Геометрический анализ. 31
3.4. Кинематический анализ. 37
3.5. Сравнение результатов, полученных различными методами. 45
4. Механизм второй.Часть 2. 46
4.1. Определение рабочей нагрузки. 46
4.2 Составление уравнений кинетостатики. 47
4.3 Сравнение результатов, полученных различными методами. 52
Приложение 1. Выходные данные стандартной программы.. 53
Приложение 2. Расчет в программе MathCad. 58
СПИСОК ЛИТЕРАТУРЫ.. 82
Первая часть курсовой работы осуществляется в
несколько этапов:
- структурный анализ механизма , целью которого является
определение количества звеньев и кинематических пар, классификация последних,
определение подвижности пар и степени подвижности механизма, а также выделение
в нем структурных групп – кинематических цепей, у которых число входов
совпадает с числом степеней подвижности
- геометрический анализ
механизма, целью которого является составление уравнений геометрического
анализа, решение их, выделение побочных и основных решений, определяющих
положения звеньев, а также исследование функций положения выходных звеньев
структурных групп.
- кинематический анализ механизма, целью которого является определение
аналогов скоростей и ускорений геометрическим и аналитическим способами.
- построение графиков функции положения и ее производных по обобщенной
координате
- сравнение результатов расчетов, полученных разными методами.
1.
1.1.
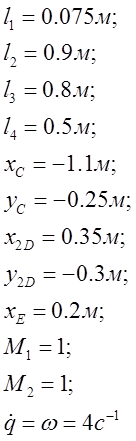
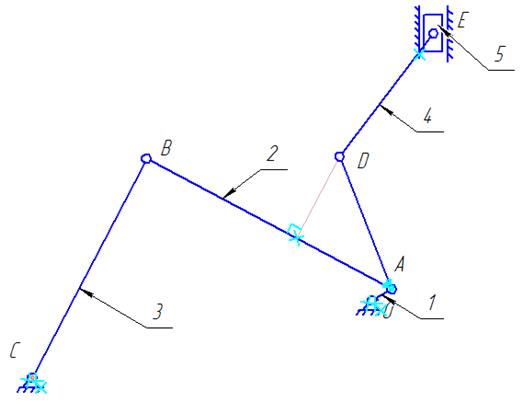
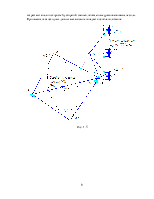
Рис. 1.1
Структурная схема механизма(см. рис. 1.1.2.1)
Звенья механизма: 1 –
кривошип; 2 –шатун; 3 – коромысло; 4 – шатун; 5 - ползун.
![]() (один вход О-А).
(один вход О-А).
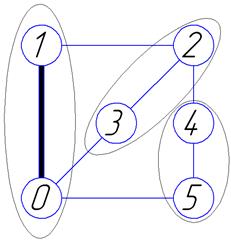 Граф
механизма:
Граф
механизма:
Рис. 1.2
Число
подвижных звеньев механизма ![]() количество кинематических пар совпадает с числом подвижностей пар
количество кинематических пар совпадает с числом подвижностей пар ![]() .
.
![]() одна степень подвижности.
одна степень подвижности.
![]() , т.е. рассматривается нормальный механизм.
, т.е. рассматривается нормальный механизм.
В плоскости движения нет избыточных связей и лишних подвижностей.
 Разделение
графа механизма на подграфы, соответствующие структурным группам:
Разделение
графа механизма на подграфы, соответствующие структурным группам:
вход 0-1;
структурные группы: 2-3; 4-5
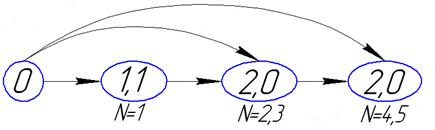
Структурный граф механизма:
Рис. 1.3
Механизм образован следующим образом: к стойке присоединяется однозвенная одноподвижная группа (звено 1) и две двухзвенные группы Ассура – ВВП (звенья 2 и 3) и ВВП (звенья 4 и 5).
1.2.
1.3.
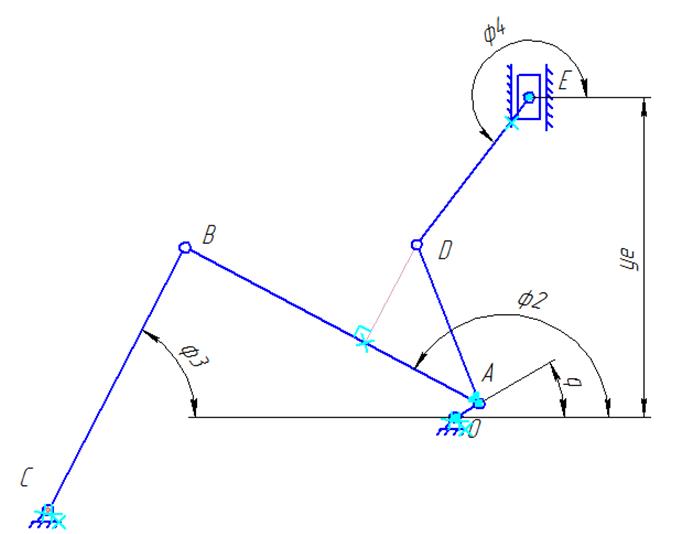
Рис. 1.4
Запишем уравнения геометрического анализа.
Группа ВВВ (2 - 3 звенья):
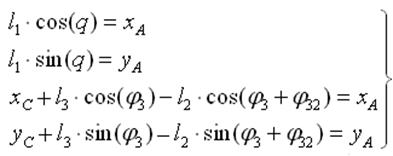
Неизвестные: ![]() ,
, ![]() .
.
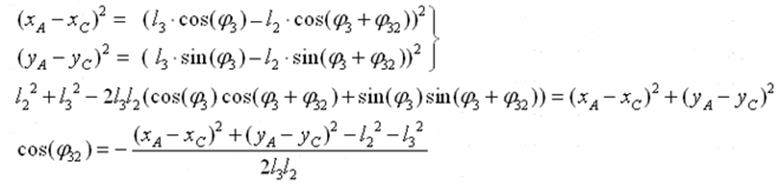
![]() Отсюда
Отсюда
![]()
![]()
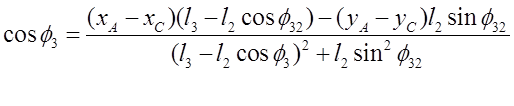
Приведем начальныеуравнения к виду

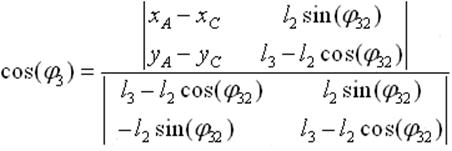 Тогда по правилу
Крамера
Тогда по правилу
Крамера

Группа ВВП(4-5 звенья)
![]()
Неизвестные:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Тогда
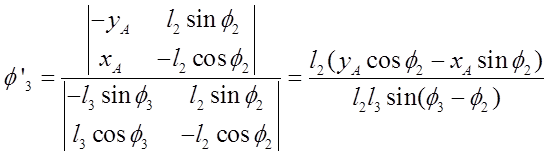
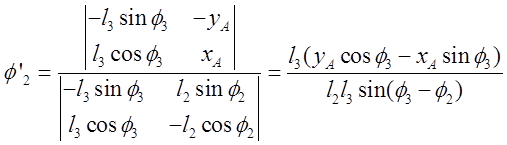
Продифференцируем полученные выражения для функций положения.
Группа ВВВ (2-3 звенья)
Неизвестные:
![]() ,
, ![]() .
.
По правилу Крамера
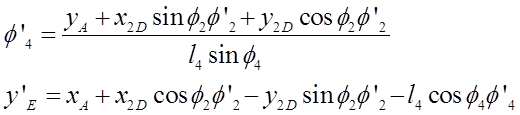
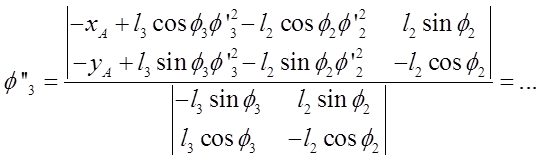
Группа ВВП (4-5 звенья)

Неизвестные: ![]() ,
, ![]() .
.
Особое положение группы ВВП (2-3 звенья) при условии
![]() , где
, где ![]()
Особое положение группы ВВП (4-5 звенья)при условии
![]() , где
, где ![]()
Особое положение механизма и способы сборки см. на рис.1.5
Способы сборки соответствуют двум решениям тригонометрических групповых
уравнений. Из одной сборки в другую можно перейти, только разобрав механизм и
переставив звенья.
В нашей работе способы сборки определяются коэффициентами М1 и М2.
В особом положении 2 решения групповых уравнений сливаются в одно. В
нем возрастают аналоги скоростей, ускорений звеньев, обобщенные
уравновешивающие силы. При имеющихся исходных данных механизм не попадает в
особое положение.
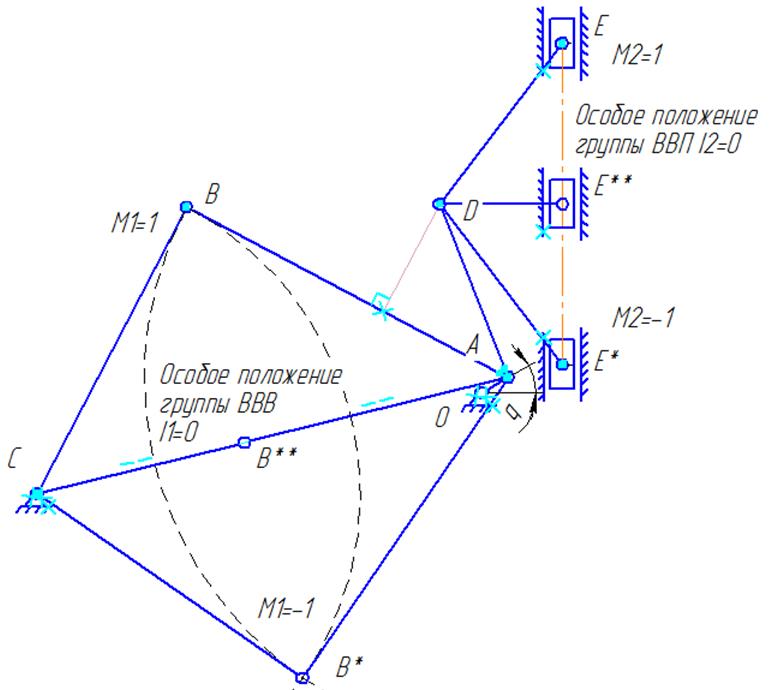
Рис. 1.5
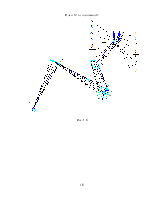
План 12-ти положений:
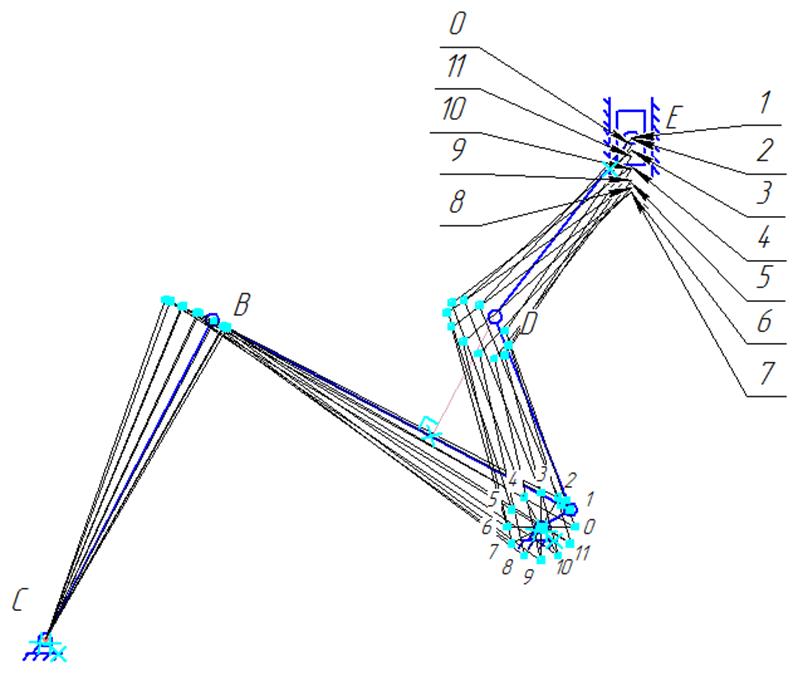
Рис. 1.6
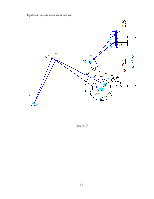
Крайние положения механизма:
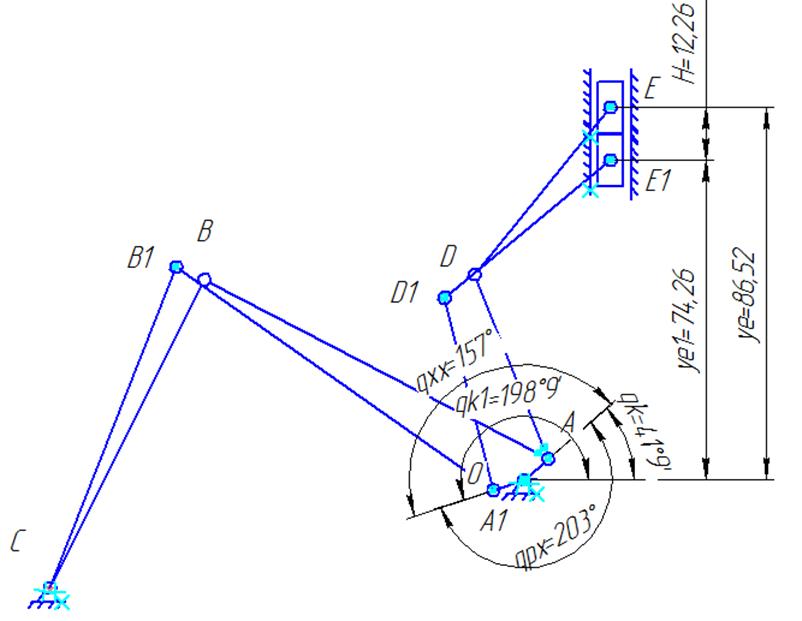
Рис. 1.7
Выражения для первых производных функций положения были получены в п. 1.1.4:
Данные выражения позволяют получить значения аналогов скоростей точек механизма. Продифференцировав их, найдем аналоги ускорений.
Группа ВВВ (2-3 звенья)

Неизвестные: ![]() ,
, ![]() .
.

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.