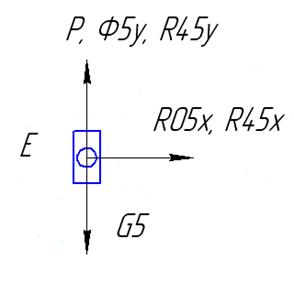
 Ползун
5
Ползун
5
![]()
![]()
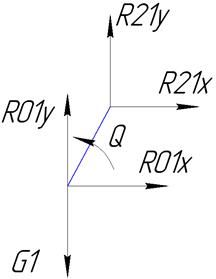 Рис. 2.5
Рис. 2.5
 Кривошип
Кривошип
Рис. 2.6
 Сравнение результатов, полученных различными методами
Сравнение результатов, полученных различными методами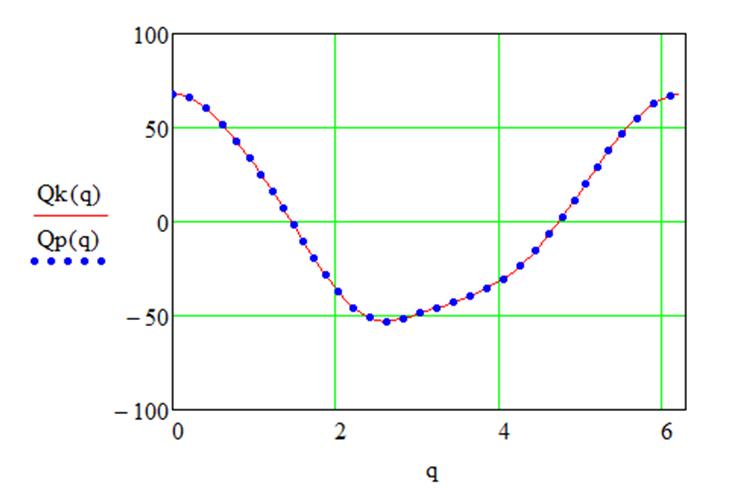
Рис. 2.7
Сравнение результатов расчета со стандартной программой
|
Параметр |
Кинетостатический расчет |
Стандартная программа |
|
R05x |
-262.041 |
-308.4454 |
|
R05y |
0 |
0 |
|
R45x |
262.041 |
308.4454 |
|
R45y |
237.695 |
237.7517 |
|
R42x |
245.46 |
339.1861 |
|
R42y |
439.728 |
414.6965 |
|
R03x |
247.806 |
313.2221 |
|
R03y |
691.041 |
816.5352 |
|
R12x |
-152.365 |
-157.7857 |
|
R12y |
771.058 |
648.0956 |
|
R01x |
-152.365 |
-162.17 |
|
R01y |
807.834 |
682.3519 |
|
Q |
55.795 |
49.2067 |
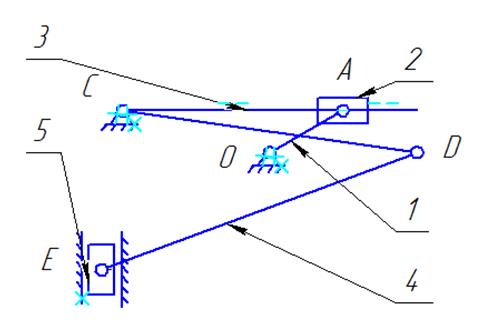
Рис. 3.1
1.
2.
3.
3.1.
 Звенья механизма 1 – кривошип; 2 –камень; 3 –
кулиса; 4 – шатун; 5 – ползун (см. рис. 2.1.1.1).
Звенья механизма 1 – кривошип; 2 –камень; 3 –
кулиса; 4 – шатун; 5 – ползун (см. рис. 2.1.1.1).
![]() (один вход О-А).
(один вход О-А).
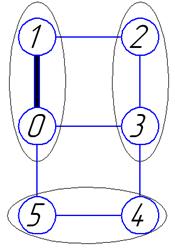
Граф механизма:
Рис. 3.2
Число
подвижных звеньев механизма ![]() количество кинематических пар совпадает с числом подвижностей пар
количество кинематических пар совпадает с числом подвижностей пар ![]()
![]() (одна степень подвижности).
(одна степень подвижности).
![]() , т.е. рассматривается нормальный механизм.
, т.е. рассматривается нормальный механизм.
В плоскости движения нет избыточных связей и лишних подвижностей.
Разделение графа механизма на подграфы, соответствующие структурным группам:
вход 0-1;
структурные группы: 2-3; 4-5
Структурный граф механизма:
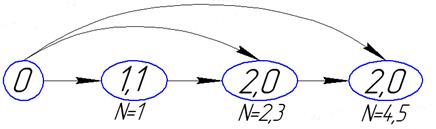
Рис. 3.3
Механизм образован следующим образом: к стойке присоединяется однозвенная одноподвижная группа (звено 1) и две двухзвенные группы Ассура – ВВП (звенья 2 и 3) и ВВП (звенья 4 и 5).
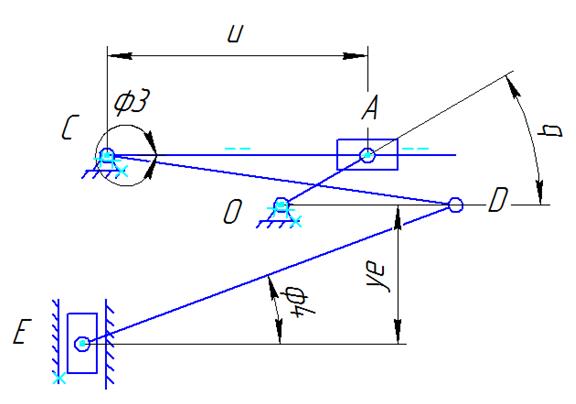
Рис. 3.4
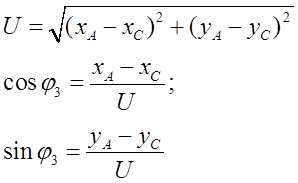
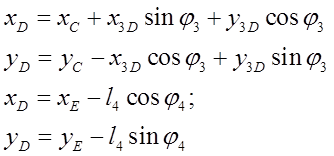
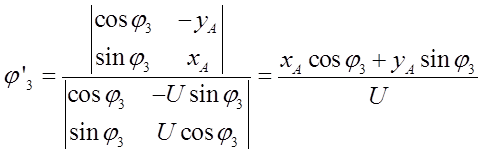
Запишем уравнения геометрического анализа.
Группа ВПВ (2-3 звенья)
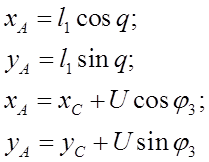
Неизвестные: U,![]() .
.
Отсюда
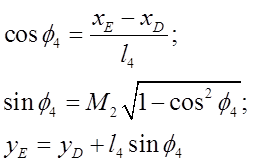
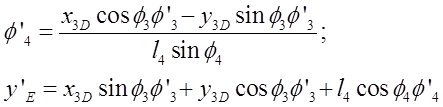
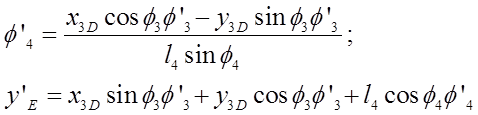
Группа ВВП(4-5 звенья)
Неизвестные: ![]() ,
,![]()
Продифференцируем полученные выражения для функций положения.
Группа ВПВ (2-3 звенья)
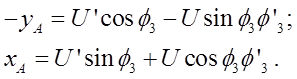
Неизвестные: ![]() ,
, ![]() .
.
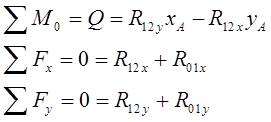
По правилу Крамера
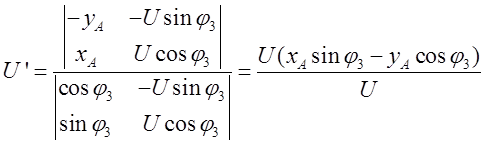
Таким
образом, при ![]() механизм будет находится в особом положении.
механизм будет находится в особом положении.
Группа ВВП(4-5 звенья).


Неизвестные: ![]() ,
, ![]()
Механизм в особом положении при![]() где
где ![]()
Механизм в особом положении. Способы сборки
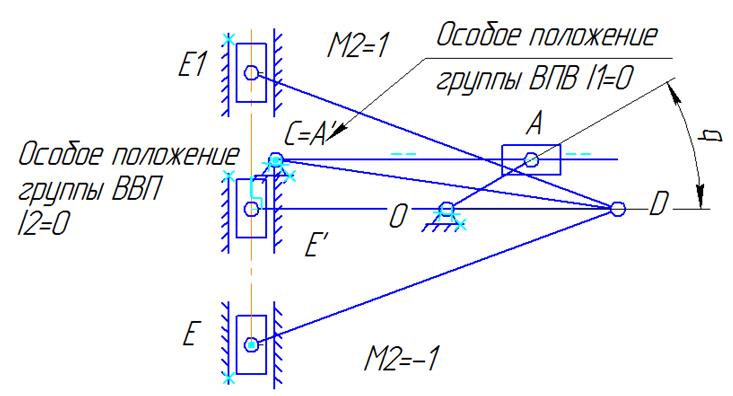
Рис. 3.5
Особое положение механизма и способы сборки см. на
рис.3.5
Способы сборки соответствуют двум решениям тригонометрических групповых
уравнений. Из одной сборки в другую можно перейти, только разобрав механизм и
переставив звенья.
В нашей работе способы сборки определяются коэффициентами М1 и М2.
В особом положении 2 решения групповых уравнений сливаются в одно. В
нем возрастают аналоги скоростей, ускорений звеньев, обобщенные
уравновешивающие силы. При имеющихся исходных данных механизм не попадает в
особое положение.
План 12-ти положений:
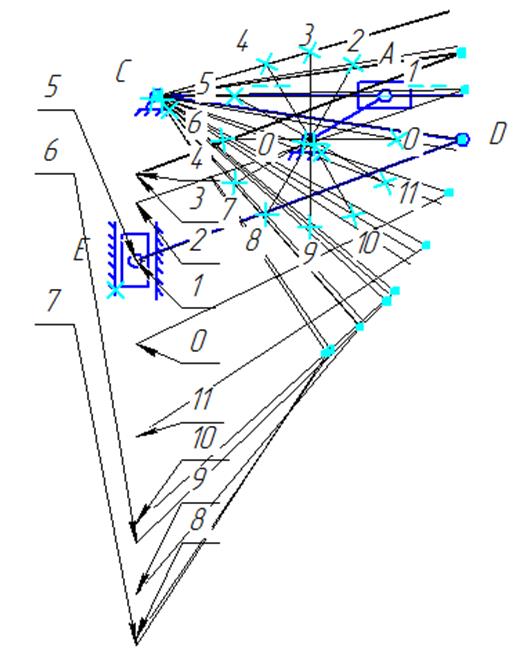
Рис. 3.6
Крайние положения:
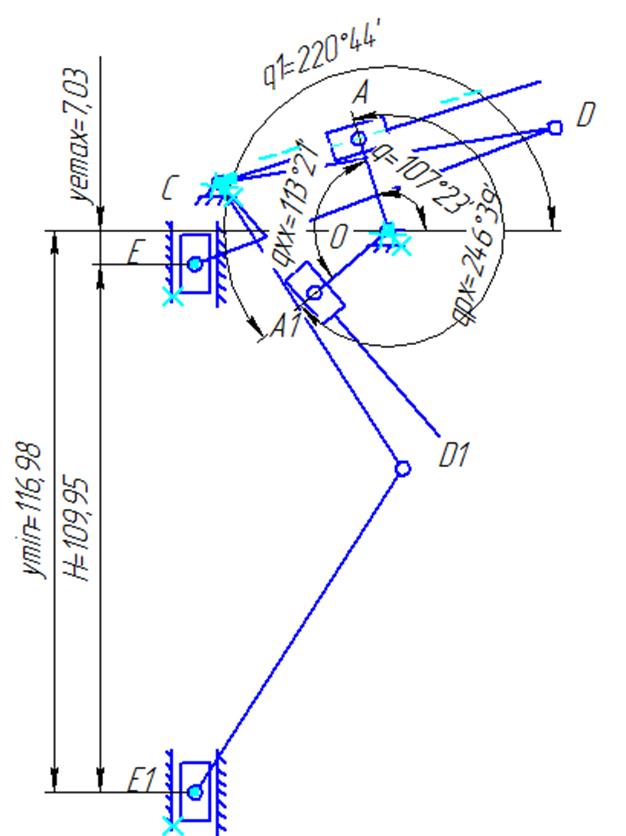
Рис. 3.7
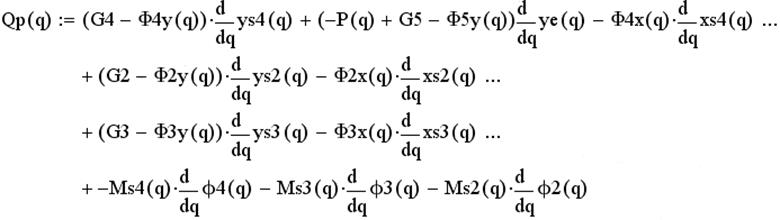
Выражения для производных функций положения были получены в п 2.1.4.
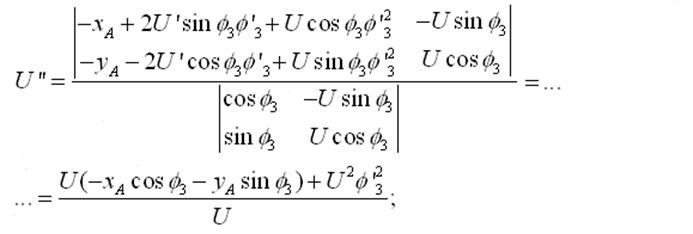
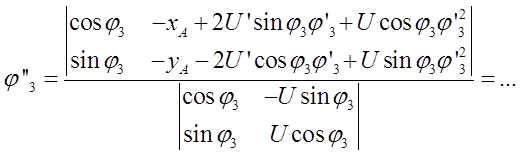
Два раза продифференцировав уравнения геометрического анализа, получим следующие выражения.
Группа ВПВ (2-3 звенья)

Неизвестные: ![]() ,
, ![]() .
.

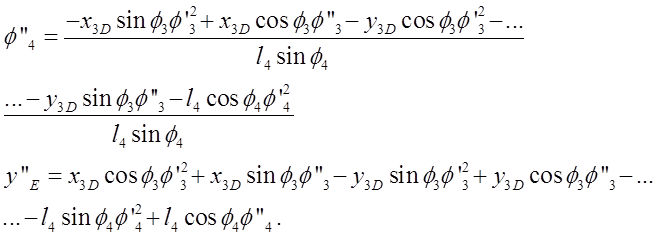
Группа ВВП(4-5 звенья)
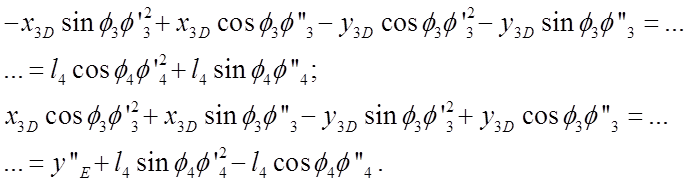
Неизвестные: ![]() ,
, ![]()
Определим скорости и ускорения графоаналитическим методом.
Свяжем с
каждым звеном векторы ![]()
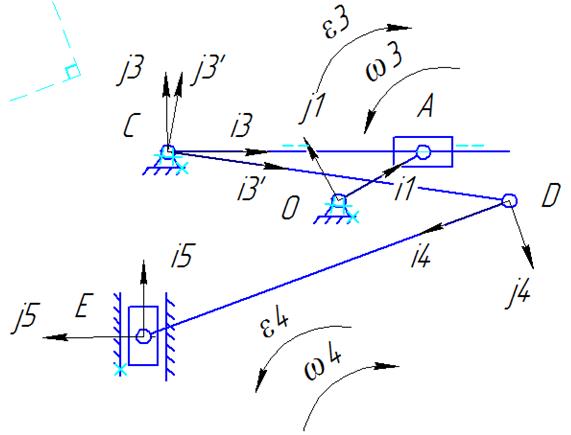
Рис. 3.8
Тогда
![]()
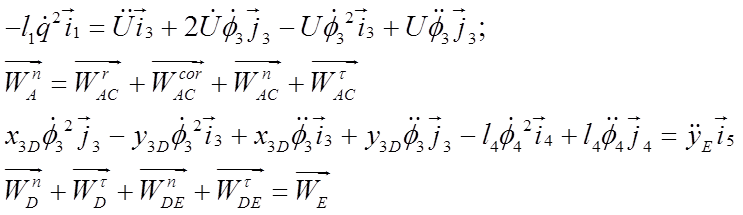
![]() Продифференцировав уравнение, получим
Продифференцировав уравнение, получим
![]()
![]()
![]()
![]()
![]()
![]()
План скоростей для
заданного положения
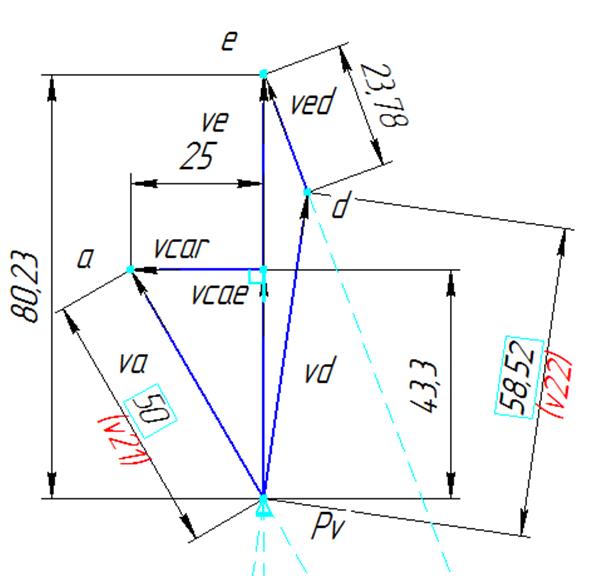
Рис. 3.9
Схема расположения звеньев механизма в крайнем положении
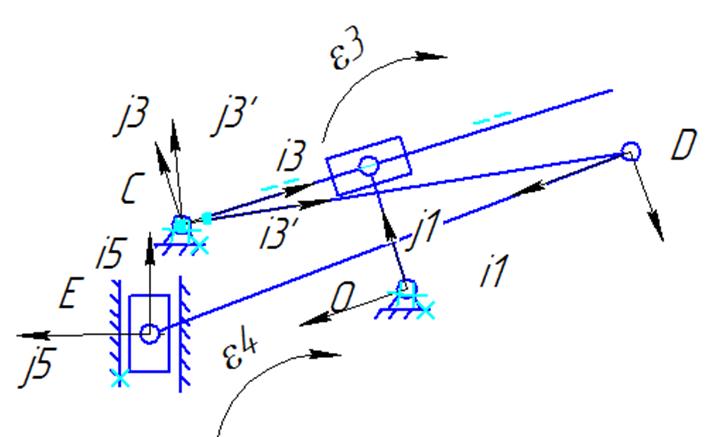
Рис. 3.10
План скоростей для крайнего положения
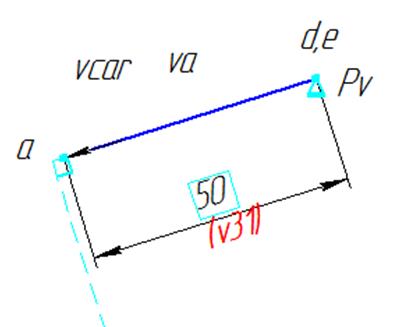
Рис. 3.11
Продифференцировав выражения для плана скоростей, получим выражения для
построения плана ускорений.
План ускорений для
заданного положения
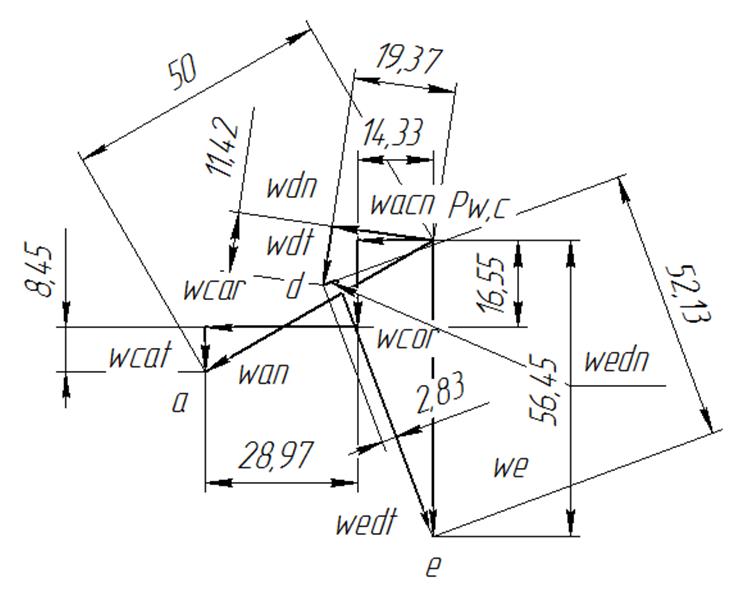
Рис. 3.12
План ускорений для
крайнего положения
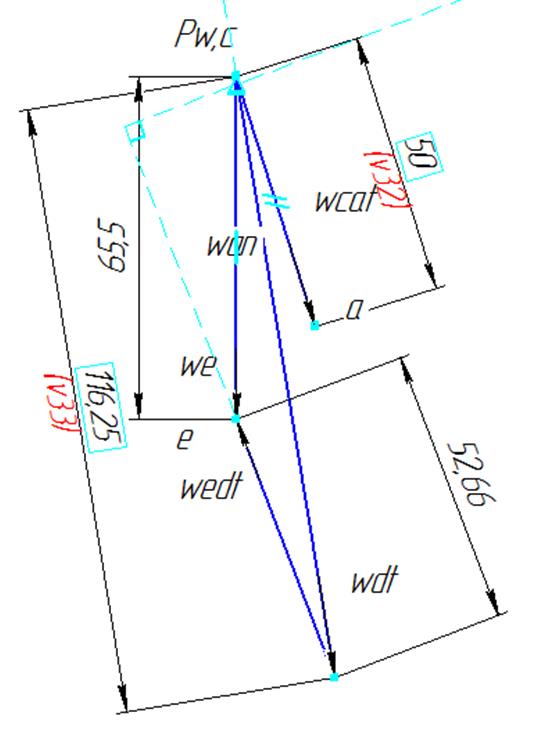
Рис. 3.13
Графики функции положения и ее производные выходного звена
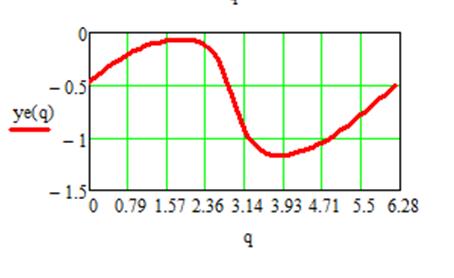
Рис. 3.14
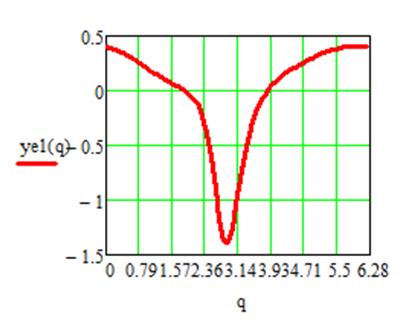
Рис. 3.15
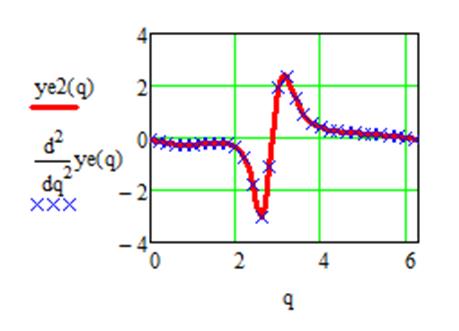
Рис. 3.16
|
Точки или звенья |
Координаты |
|||||
|
Аналитический метод |
Графоаналитический метод |
По программе |
||||
|
X |
Y |
X |
Y |
X |
Y |
|
|
точка A |
0.173 |
0.1 |
0.1732 |
0.1 |
0.173205 |
0.1 |
|
точка D |
0.35 |
0 |
0.35 |
0 |
0.35 |
0 |
|
точка E |
-0.4 |
-0.278 |
-0.4 |
-0.278388 |
-0.4 |
-0.278388 |
|
φ |
||||||
|
Звено 3 |
0 |
0 |
- |
|||
|
Звено 4 |
200.364 |
200.3641 |
- |
|||
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.