Граф G’=<X’; r’> называют частичным для графа G=<X; r>, если он порождён подмножеством рёбер или дуг исходного графа G, т.е. r’Í r, вместе с инцидентными им вершинами, т.е. X’ÍX. Например, для графа (см. рис. 10а) подмножество рёбер r’={r01, r04, r15, r45} вместе с инцидентными им вершинами X’={x0, x1, x4, x5} формирует частичный граф G’=<X’; r’> (см. рис. 15а)..
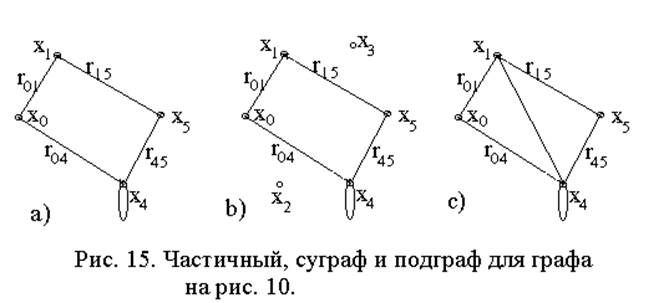 |
Граф G’=<X’; r’> называют подграфом графа G=<X; r>, если он порождён подмножеством вершин исходного графа, т.е. X’ÍX, совместно с инцидентными им рёбрами или дугами. Например, для графа (см. рис. 10а) задание подмножества вершин X¢={x0, x1, x4, x5} вместе с инцидентными им ребрами формирует подграф G’=<X’; r’> (см. рис. 15с).
Суграф G’=<X’; r’> связанного графа G=<X; r>, формируемый без циклов, петель и кратных рёбер, называют остовом графа G=<X; r>.
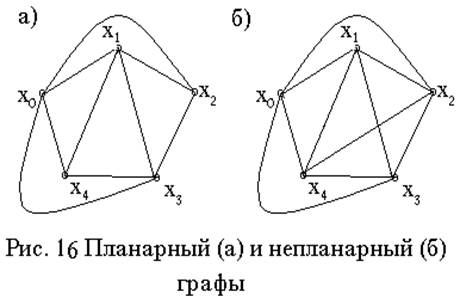 Граф называют планарным,
если он может быть изображён на плоскости так, что рёбра или дуги графа не
пересекаются. Плоские графы используют при проектировании сетей телекоммуникации,
особенно при проектировании печатных плат и т.п.
Граф называют планарным,
если он может быть изображён на плоскости так, что рёбра или дуги графа не
пересекаются. Плоские графы используют при проектировании сетей телекоммуникации,
особенно при проектировании печатных плат и т.п.
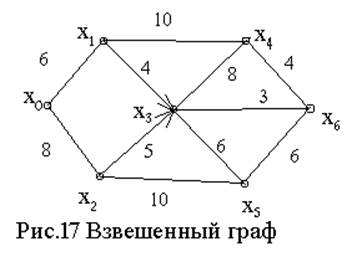 Граф G=<X;r> называют взвешенным, если его
рёбра или вершины имеют дополнительные характеристики:
время исполнения команды операционной системы или оператора программы,
вероятность наступления события или надёжность эксплуатации узла и т.п.
определяют вес вершины графа, а протяжённость линий транспортных или
электрических сетей, их пропускная способность по какому-либо параметру
определяют вес ребра или дуги.
Граф G=<X;r> называют взвешенным, если его
рёбра или вершины имеют дополнительные характеристики:
время исполнения команды операционной системы или оператора программы,
вероятность наступления события или надёжность эксплуатации узла и т.п.
определяют вес вершины графа, а протяжённость линий транспортных или
электрических сетей, их пропускная способность по какому-либо параметру
определяют вес ребра или дуги.
|
rij |
(xi, xj) |
xi |
hxi={xj} |
Граф может быть задан списочными или матричными структурами. При задании списком используют обе модели графа: G=<X; r> и G=<X; h>. |
|
|
r01 |
(x0, x1) |
x0 |
x1, x4 |
||
|
r04 |
(x0, x4) |
x1 |
x3, x4, x5 |
||
|
r13 |
(x1,x3) |
x2 |
- |
||
|
r14 |
(x1, x4) |
x3 |
x5 |
||
|
r15 |
(x1, x5) |
x4 |
x5 |
||
|
r35 |
(x3, x5) |
x5 |
- |
||
|
r44 |
(x4, x4) |
||||
|
r45 |
(x4, x5) |
Списки отношений удобны для хранения информации о весе ребра и поиска инцидентных вершин,а списки отображений - о весе вершины и поиска смежных вершин.
![]() Матрица инциденции.
Поскольку инциденция есть отношение принадлежности элемента одного
множества X другому множеству r, то матрица инциденции ||qi;j|| должна быть прямоугольной, число
строк которой равно мощности множества отношений |r|=m, а число столбцов - мощности множества вершин графа |X|=n. Элементы матрицы инциденции
неориентированного графа определяются по формуле: 1, если (xi, xj) инцидентно xj,
Матрица инциденции.
Поскольку инциденция есть отношение принадлежности элемента одного
множества X другому множеству r, то матрица инциденции ||qi;j|| должна быть прямоугольной, число
строк которой равно мощности множества отношений |r|=m, а число столбцов - мощности множества вершин графа |X|=n. Элементы матрицы инциденции
неориентированного графа определяются по формуле: 1, если (xi, xj) инцидентно xj,
hij =
0, в противном случае.
Cледует отметить, что в каждой строке матрицы количество единиц равно двум, а в каждом столбце равно степени вершины - di (см. табл. а) для графа на рис. 10).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.