9 Построение электрической схемы синтезированной системы
В результате синтеза мы добились требуемых показателей качества, убедились в целесообразности использования данной схемы корректирующего устройства. Построим электрическую схему системы с включенным в нее корректирующим устройством.
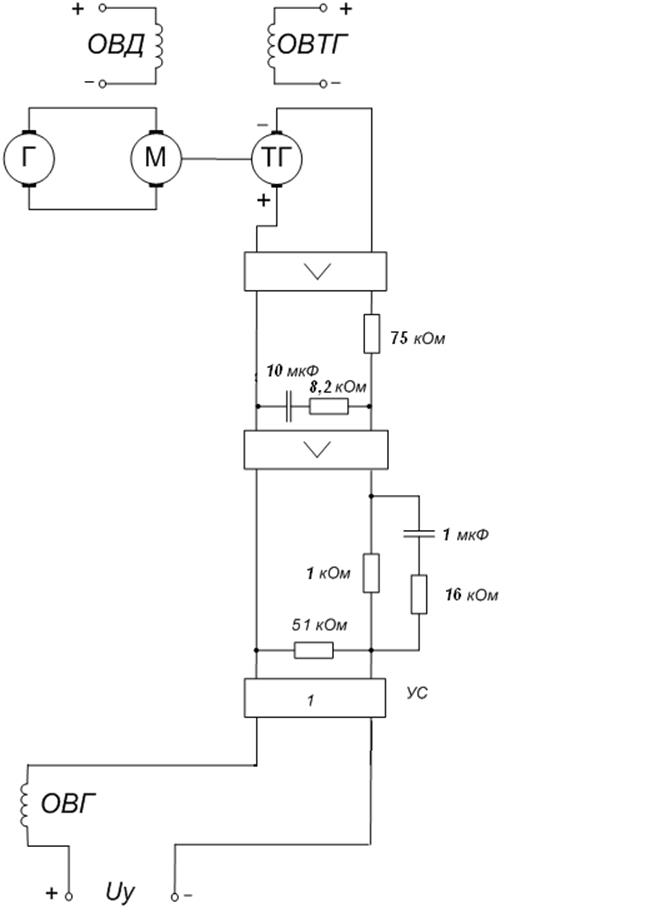
Рисунок 19 − Электрическая схема синтезированной системы
Заключение
В результате проделанной курсовой работы было достигнуто требуемое качество процесса регулирования путем синтеза корректирующего устройства и включения его в цепь исходной АСР.
Синтез выполнялся методом логарифмических амплитудно-частотных характеристик. В процессе синтеза было выбрано последовательное корректирующее устройство, так как оно не требует сложных математических расчетов, а также просто в монтаже. Произведен расчет его параметров. После чего это корректирующее устройство было включено в цепь исходной АСР и произведен анализ устойчивости полученной скорректированной системы с помощью критерия Гурвица и построен переходной процесс.
В результате анализа переходного процесса было отмечено, что изменился тип переходного процесса с колебательного на процесс монотонный, без перерегулирования, а также сократилось время регулирования. Исходя из выше сказанного, синтез автоматической системы регулирования выполнен правильно, и было достигнуто выполнение поставленной перед нами задачи.
Список используемых программных продуктов
1 MathCAD 2001 – для математических вычислений и построения графиков;
2 Excel 2003 – для составления таблиц данных;
3 Visio 2003 – для создания структурных схем и схематических графиков;
4 Word 2003 – для создания и обработки текстового материала.
Список литературы
1 Фатеев А.В., Вавилов А.А., Смольников Л.П. и др. Расчет автоматических систем Под ред. А.В. Фатеева. М.:Высш.шк., 1973. − 336 с.
2 Хлыпало Е.И. Нелинейные системы автоматического регулирования: Расчет и проектирование Под ред. Е.П.Попова. Л.: Энергия, 1967.-452 с.
3 Осипова В.А. Теория автоматического управления: Методические указания к курсовой работе для студентов специальности 220301 (210200) «Автоматизация технологических процессов и производств (по отраслям)» ГУЦМиЗ. − Красноярск, 2005. − 28 с.
4 СТП 2.407-2005 Текстовые документы в учебном процессе. Общие требования к оформлению: ГУЦМиЗ. – Красноярск. - 2005. – 68 с.
5 Андреев Н. И., Васильев С. К., Захаров В. Н. и др. Задачник по теории автоматического управления Под ред. А. С. Шаталова. М.: Энергия., 1979. – 544 с.
6 Т. К. Кузьменко. Электроника: Методические указания к практическим занятиям для студентов специальности 210200 ГАЦМиЗ. – Красноярск. - 2000. – 44 с.
Заключение
В ходе проделанной курсовой работы были закреплены основные положения теории автоматического управления, а также получены практические навыки расчета систем автоматического регулирования.
В результате расчета был выбран двигатель, электромашинный усилитель и тахогенератор. Для каждого из них была найдена передаточная функция, а также общая передаточная функция системы.
После нахождения коэффициента передачи исполнительного двигателя система была проверена на устойчивость. При помощи метода трапеций построен переходный процесс, анализ которого показал, что система устойчива, но качество процесса регулирования не удовлетворительное, так как время регулирования весьма велико. Чтобы это исправить требуется синтез.
Синтез выполнен методом логарифмических амплитудно-частотных характеристик. В процессе синтеза было выбрано последовательное корректирующее устройство, так как оно не требует сложных математических расчетов, проще включается в цепь и не требует большой точности АСР.
Далее найдена логарифмическая амплитудно-частотная характеристика конкретного корректирующего устройства, для которого были рассчитаны все необходимые параметры.
После чего в передаточную функцию системы было включено это корректирующее устройство и система проверена на устойчивость.
Как показал критерий Михайлова, после расчета корректирующего устройства система осталась устойчивой, и качество процесса регулирования улучшилось. Время регулирования сократилось с 5,6 до 2,28 с., но не меньше заданного (2 с). Следовательно, синтез автоматической системы регулирования выполнен не корректно и требуемая задача не выполнена.
При выполнении данной работы были использованы следующие пакеты прикладных программ:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.