Введение:
Первая проблема, которую решала теория управления, была направлена на обеспечение устойчивости автоматических систем. Позднее главной задачей стало достижение необходимого качества процесса регулирования. Систематизация и обобщение накопленных знаний в процессе решения этих задач привели к созданию методов синтеза, при этом системы должны иметь требуемое качество регулирования.
Теория автоматического управления решает две задачи: задачу анализа и задачу синтеза.
К задачам анализа относятся: определение устойчивости, динамических характеристик, Д-разбиение и метод трапеций.
Задача синтеза является обратной по отношению к задаче анализа, в ней нужно определить структуру и параметры системы по заданным показателям качества. В простейших случаях устойчивость и необходимое качество регулирование могут быть достигнуты изменением параметров системы. Если же изменение параметров системы не даёт желаемого результата, то задача решается путем введения в систему дополнительных корректирующих устройств. На практике часто используется метод логарифмических амплитудно-частотных характеристик.
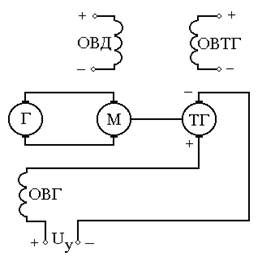
Рисунок 1− Электрическая схема исходной АСР
1 Выбор элементов системы
Исходные данные необходимые для расчета АСР:
nк=1500 об/мин; Рном=
6 кВт; t![]() ≤1 с;
D≤10%.
≤1 с;
D≤10%.
1.1 Выбор двигателя
Выбор двигателя произведен на 110 В по данным справочника [1] в соответствии с заданием. Данные двигателя приведены в таблице 1.
Таблица 1 − Технические данные двигателя постоянного тока П-51, nном=1500 об/мин
|
Тип двигателя |
Uном, В |
Рном, кВт |
Iном, А |
hном, % |
2р |
2а |
wя |
rя+ rд.п. (при 15 °С), Ом |
rст, Ом |
wв1 (на полюс) |
rв общ (при 15°С),Ом |
GD2, кГ×м2 |
|
П-51 |
110 |
6 |
66 |
82,5 |
4 |
2 |
155 |
0,1026 |
0,0044 |
900 |
45,2 |
0,35 |
1.2 Выбор генератора
Генератор выбран по данным справочника [1]. Выбранный генератор соответствует по напряжению и мощности ранее выбранному двигателю. Данные генератора приведены в таблице 2.
Таблица 2 − Технические данные генератора П-52
|
Тип генератора |
Uном, В |
Рном, кВт |
Iном, А |
Р1, кВт |
nном., с |
2р |
2а |
wя |
rя+ rд.п. (при 15 °С), Ом |
wв1 |
rв., Ом |
rст, Ом |
|
П-52 |
115 |
6,5 |
56,4 |
7,9 |
1500 |
4 |
2 |
186 |
0,15 |
600 |
28,3 |
0,0096 |
1.3 Выбор тахогенератора
Тахогенератор выбирают таким образом, чтобы при заданной скорости вращения вала двигателя находиться на линейном участке его выходной характеристики. Данные тахогенератора приведены в таблице 3.
Таблица 3 − Технические данные асинхронного тахогенератора
|
Тип тахогенератора |
Uвозб, В |
Частота сети, Гц |
Рвозб, Вт |
Крутизна генераторной э.д.с., мВ/об/мин |
Остаточное напряжение, мВ |
nном, об/мин |
Вес, кГ |
Ток в ОВТГ, А |
|
АТ-162 |
110 |
4000 |
8 |
4±0,4 |
80 |
4000 |
0,9 |
0,2 |
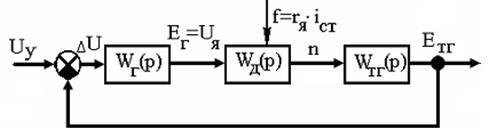
Рисунок 2− Структурная схема заданной системы
2 Расчет передаточных функций элементов системы и составление передаточной функции замкнутой системы
2.1 Расчет передаточной функции двигателя
Передаточная функция двигателя имеет вид:

Определим для двигателя типа П-32 параметры передаточной функции при номинальном потоке возбуждения. Принимаем приведенный момент инерции нагрузки Iп равным моменту инерции якоря двигателя Iд.
Для численного выражения момента инерции I в единицах СИ через маховый момент GD2 кГ×м2 воспользуемся соотношением 1:
 ;
; ![]()
 .
.
Для расчета воспользуемся данными, приведенными в таблице 1.
Найдем значения Iя ном, rяц и Iд:
 ,
,
где a=1,2 − коэффициент, учитывающий перегрев обмотки по сравнению с 15 °С.
![]() .
.
Определяем постоянные для двигателя:
 ;
;
 .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.