СИБИРСКИЙ ПОЛИТЕХНИЧЕСКИЙ КОЛЛЕДЖ
Утверждено:
по дисциплине
«Типовые элементы систем автоматического управления»
Тема: «Изучение исполнительных механизмов с регулирующими органами»
Разработал: студент
Проверил: преподаватель Л.Ю. Жуков
Согласовано:
Председатель ЦК «ЭТ и АТП»:
____________________________/О.Н. Быкова/
2006
Изучение исполнительных механизмов с регулирующими органами.
1. ЦЕЛЬ РАБОТЫ:
1.1. Изучить исполнительные механизмы с регулирующими органами, разобраться с конструкцией и принципом действия.
2. ТЕОРЕТИЧЕСКОЕ ОБОСНОВАНИЕ.
2.1. Исполнительные механизмы иногда называют сервомеханизмами, сервоприводами и даже сервомоторами. Предназначены для силового воздействия на конечное звено автоматических систем – регулирующие органы (РО).
2.2. Классификация исполнительных механизмов. По назначению:
- двухпозиционные (выполняют операцию типа «открыто – закрыто»);
- многопозиционные (выполняют ступенчатое или плавное (аналоговое) регулирование).
По принципу действия:
- электрические (электромагнитные, электродвигатели);
- пневматические (мембранные, поршневые);
- гидравлические.
По конструктивному признаку:
- поршневые (с поступательным и вращающим приводами);
- электромагнитные;
- мембранные;
- электромоторные;
- комбинированные.
По принципу воздействия на регулирующий орган:
- силовые (воздействие осуществляется с применением определенного усилия);
- параметрические (воздействие связано с изменением какого-либо параметра или состояния вещества).
Основными показателями исполнительных механизмов характеризующих их регулирующую способность является: коэффициент усиления, а также скорость на выходе исполнительного механизма.
По скорости на выходе, исполнительные механизмы делятся:
- сервомоторы с постоянной скоростью;
- сервомоторы с пропорциональной скоростью (синхронный двигатель).
2.3. Электрические серводвигатели (электродвигатели). Чаще всего представляют собой трех фазный асинхронный двигатель с рабочим напряжением 220 или 380 В и частотой вращения до 1400 об/мин. Обычно сочленяются с редукторами (то есть часто двигатель и редуктор объединяются в одном корпусе). На выходном валу сервопривода крепится рычаг для соединения с регулирующим органом, который может работать с кулачком. Полный ход сервопривода такого рода соответствует повороту выходного вала на 90°. Время полного хода выходного вала называется временем сервопривода. Электрический сервопривод выпускают нескольких модификаций с двигателями разной мощности. Сервоприводами малой мощности типа РМ и РМБ. У них мощность на выходном валу – от 0,15 до 0,25 кВт. Вращающий момент выходного вала до 25 кг·м. Сервоприводы большой мощности (РБ) могут создать на выходном валу до 100-400 кг·м.
2.4. Однооборотные ИМ. Состоят из электродвигателя и силового редуктора; чаще всего в их состав входят концевые переключатели, датчик положения (индуктивный и потенциометрические преобразователи).
Концевые выключатели – это контактные устройства, которые должны срабатывать при крайнем положении выходного вала, положение срабатывания обычно задается кулачками, связанными с этим валом.
Датчиком положения называется преобразователь, по изменению параметров которого можно определить угол поворота выходного вала ИМ.
По построению схемы управления, бывают:
- механизмы с контактным управлением (реле, контакторы, магнитные пускатели).
- механизмы с бесконтактным управлением (магнитные усилители, тиристорные пусковые устройства).
Наиболее широко распространенными электрическим механизмом поворотного действия является МЭО (механизм электрический однооборотный). Принцип действия его рассмотрен в лабораторной работе «Принцип действия механизма однооборотного МЭО, конструкция, схема включения».
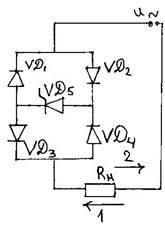 2.5. Пусковые
устройства. Являются исполнительными устройствами, предназначенными для пуска,
остановок и реверса устройств типа МЭО. Рассмотрим бесконтактные пусковые
устройства, коммутация цепей. Встречаются схемы на тиристорах и симисторах. Так
как тиристор не позволяет управлять переменным током, управление осуществляется
диодной ячейкой (рис. 1), она представляет
собой по сути двуполупериодный выпрямительный мост, в диагональ которого вместо
сопротивления нагрузки включается тиристор. Задача ячейки обеспечить подачу
питания на Rн (реально электродвигатель).
2.5. Пусковые
устройства. Являются исполнительными устройствами, предназначенными для пуска,
остановок и реверса устройств типа МЭО. Рассмотрим бесконтактные пусковые
устройства, коммутация цепей. Встречаются схемы на тиристорах и симисторах. Так
как тиристор не позволяет управлять переменным током, управление осуществляется
диодной ячейкой (рис. 1), она представляет
собой по сути двуполупериодный выпрямительный мост, в диагональ которого вместо
сопротивления нагрузки включается тиристор. Задача ячейки обеспечить подачу
питания на Rн (реально электродвигатель).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


