Рассмотрим работу ячейки. Допустим в данный момент времени «+» на аноде VD2 и катоде VD1; при закрытом VD5 тока через Rн не будет, так как цепь разомкнута. VD1 и VD3, VD2 и VD4 – включены встречно. Аналогичная ситуация про- Рисунок 1
зойдет при «–» полуволне. Для коммутации ячейки на управляющий электрод VD5 подается, открыв сигнал в виде постоянного напряжения.
Допустим Uупр подано в момент времени t «+» оказывается на аноде VD4 и катоде VD3. Далее «+» проходит через VD4, VD5, VD1. Направление тока через Rн будет 1.
Когда «+» приходит на анод VD2 и катод VD1, цепь замыкается через VD2, VD5, VD3. Направление тока через нагрузку – 2. Очевидно, что если коммутировать с помощью такой ячейки однофазный не реверсивный двигатель (допустим рубанок), то приподаче управляющего сигнала двигатель будет вращаться, при отсутствии Uупр не будет.
 2.6. Пускатель
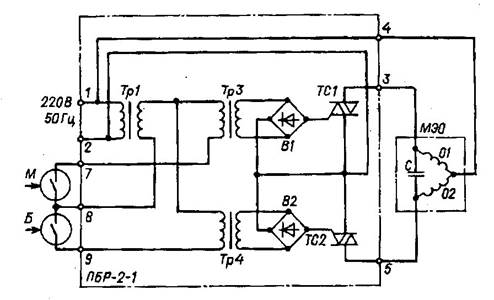
безконтактный реверсивный (ПБР) (рис. 2). Предназначен для управления
однофазными РД (МЭО). Коммутация цепей – с помощью симисторов (коммутируют
переменный ток). Управление осуществляется замыканием переключателей: либо М
(прямое включение), либо Б (реверс). Б и М – «больше нормы» и «меньше нормы»
соответственно. Контакт 1 подключен к МЭО, контакт 2 коммутируется через ТС1
или ТС2 к обмотке D1 или D2.
При замыкании М напряжение со вторичной обмотки ТР1 подается Рисунок
2
2.6. Пускатель
безконтактный реверсивный (ПБР) (рис. 2). Предназначен для управления
однофазными РД (МЭО). Коммутация цепей – с помощью симисторов (коммутируют
переменный ток). Управление осуществляется замыканием переключателей: либо М
(прямое включение), либо Б (реверс). Б и М – «больше нормы» и «меньше нормы»
соответственно. Контакт 1 подключен к МЭО, контакт 2 коммутируется через ТС1
или ТС2 к обмотке D1 или D2.
При замыкании М напряжение со вторичной обмотки ТР1 подается Рисунок
2
на первичную ТР3. При этом со вторичной обмотки ТР3 через выпрямитель вырабатывается управляющий сигнал на ТС1. При замыкании контакта Б через ТР4 аналогично управляем ТС2.
2.7.1. Электромагнитные муфты. Муфты предназначены для соединения ведущего и ведомого валов, а электромагнитные являются сцепными муфтами, которые управляют электрическим сигналом.
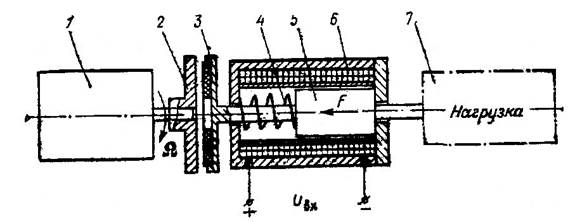 2.7.2. Фрикционная
муфта с сухим трением (рис. 3). Состоит
из ведущего фланца 2, закрепленного на двигатели 1. Ведомого фланца 3 на
котором закреплен специальный фрикционный материал (для повышения коэффициента
трения), с ведомым фланцем связан сердечник 5 (жестко), расположенный в соленоиде
и связанный с нагрузкой. Сердечник 5 с помощью шлицевого соединения может
перемещаться вдоль оси вала, связанного с
нагруз-
Рисунок 3
2.7.2. Фрикционная
муфта с сухим трением (рис. 3). Состоит
из ведущего фланца 2, закрепленного на двигатели 1. Ведомого фланца 3 на
котором закреплен специальный фрикционный материал (для повышения коэффициента
трения), с ведомым фланцем связан сердечник 5 (жестко), расположенный в соленоиде
и связанный с нагрузкой. Сердечник 5 с помощью шлицевого соединения может
перемещаться вдоль оси вала, связанного с
нагруз-
Рисунок 3
кой, таким образом при подаче Uвх на катушку 6 шток 5 будет перемещаться под действием электромагнитных сил в направлении ведущего фланца. При этом происходит передача вращающего момента на нагрузку.
2.7.3. Ферропорошковая муфта (рис. 4). Муфта с вязким трением состоит из двух полумуфт 1, внутри которых расположена катушка 4 и полумуфта 2, которая связана с нагрузкой. Выводы катушки связаны с кольцами на ведомом валу. Через них и связаны с ними графитовые щетки. На катушку можно подавать напряжение. Все пространство между 1 и 2 заполнено ферромагнитной средой 3, состоящей из смеси порошка карбонильного или кремниевого железа и смазывающего вещества (масло, графит и т.д).
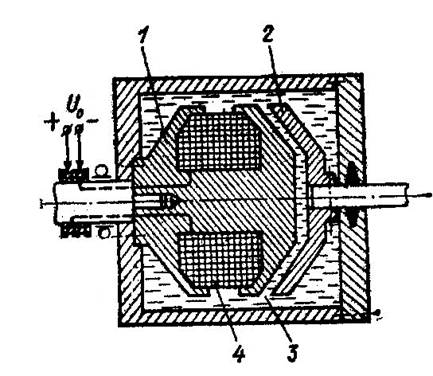 При подаче тока в
катушку 4 под действием появившегося магнитного поля, ферромагнитная
состовляющая резко уплотняется в зазоре между 1 и 2, при этом увеличивается или
появляется коэффициент трения и происходит передача момента с 1 на 2.
При подаче тока в
катушку 4 под действием появившегося магнитного поля, ферромагнитная
состовляющая резко уплотняется в зазоре между 1 и 2, при этом увеличивается или
появляется коэффициент трения и происходит передача момента с 1 на 2.
2.8. Как уже говорилось в пункте 2.1. исполнительные механизмы оказывают силовое воздействие на регулирующие органы. В свою очередь, регулирующие органы оказывают непосредственное воздействие на объект регулирования, то есть это элемент системы, который непосредственно изменяют парамет- Рисунок 4
ры воздействия путем изменения количества вещества, энергии или состояния, подаваемых на вход Р.О, в зависимости от значений регулируемого параметра.
Входной величиной регулируемого объекта может быть силовое воздействие (сила, давление), электрические величины (ток, напряжение), изменение состояния вещества.
Силовые характеристики регулирующих органов:
– диапазон регулирования – это изменение расхода вещества при перемещении Р.О из одного крайнего положение в другое.
– перемещающее усилие – это усилие, которое необходимо приложить к Р.О для его перемещения.
 – расходная характеристика
– это зависимость между изменением положения Р.О и расходом подаваемого в
объект вещества (обычно в %). Следует учитывать, что расход подаваемого
вещества зависит не только от свойств Р.О, но и от свойств подаваемого
вещества: плотности, вязкости, текучести, условий работы Р.О (напора и т.д).
Рисунок 5
– расходная характеристика
– это зависимость между изменением положения Р.О и расходом подаваемого в
объект вещества (обычно в %). Следует учитывать, что расход подаваемого
вещества зависит не только от свойств Р.О, но и от свойств подаваемого
вещества: плотности, вязкости, текучести, условий работы Р.О (напора и т.д).
Рисунок 5
Расходную характеристику Р.О желательно иметь линейной, но в зависимости от конструкции Р.О она может быть квадратичной (параболической, логической и т.д).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.