Индуктивным называют такой преобразователь, который преобразует значение измеряемой (механической) величины в значение индуктивности. Он представляет собой катушку индуктивности, полное сопротивление которой изменяется при взаимном относительном перемещении элементов магнитопровода. Простейший прибор представляет собой (рис. 1) воздушный зазор δ, длина которого изменяется под действием измеряемой величины Р (сосредоточенная сила, давление, линейное перемещение), а вследствие этого – магнитное сопротивление магнитной цепи и индуктивность катушки, надетой на сердечник и включенной в цепь переменного тока. Индуктивность L катушки нахо- Рисунок 1
дится, исходя из уравнения 1:
L = N2/Rм, или L = N2/Rм.ст + Rδ = N2/ℓс/µ·S + 2δ/µ0·S, (1)
где: N – число витков катушки;
Rм – полное сопротивление магнитной цепи;
Rм.ст – магнитное сопротивление участков из стали;
Rδ – магнитное сопротивление воздушных зазоров;
δ – воздушный зазор;
µ0 – магнитная проницаемость воздушного зазора;
µ – магнитная проницаемость сердечника;
ℓс – длина средней магнитной линии ферромагнетика
S – площадь.
 Таким образом, у
данного преобразователя естественной входной величиной является
перемещение сердечника 1, а выходной – изменение
индуктивности обмотки 2. Изменение индуктивного сопротивления катушки ведет к изменению ее полного
сопротивления Z. В связи с этим возникает функциональная
зависимость между измеряемой механической величиной Р и электрическим сопротивлением Z преобразователя (уравнение
2):
Таким образом, у
данного преобразователя естественной входной величиной является
перемещение сердечника 1, а выходной – изменение
индуктивности обмотки 2. Изменение индуктивного сопротивления катушки ведет к изменению ее полного
сопротивления Z. В связи с этим возникает функциональная
зависимость между измеряемой механической величиной Р и электрическим сопротивлением Z преобразователя (уравнение
2):
Z = f(P) и DZ = f(DP). (2)
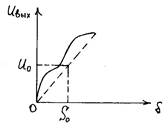
2.2. Анализ принципа действия показывает, что статическая характеристика имеет следующие недостатки:
- фаза выходного сигнала не зависит от направления перемещения якоря;
- для измерения перемещения в обоих направлениях не об- График 1
ходим начальный зазор (график 1), что приводит к наличию начального потока;
- на якорь постоянно действует электромагнитная сила, стремящаяся притянуть его к сердечнику. При высоких токах через катушку это влияние будет очень существенно.
2.3. Разновидности индуктивных преобразователей представлены на рисунке 2. На рисунке 2, а представлен преобразователь с изменяющейся в соответствии со значением измеряемой величины площадью воздушного зазора. Преобразователи такого типа применяются при измерении перемещений Dl порядка 5...20 мм.
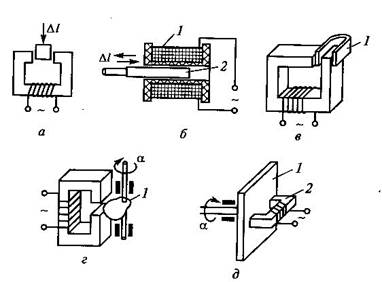 На рисунке 2, б представлен преобразователь с
разомкнутой магнитной цепью. Он
состоит из катушки 1, внутри которой помещен стальной сердечник 2. Вследствие перемещения сердечника, изменяется индуктивность катушки, которая является
функцией измеряемой механической величины.
На рисунке 2, б представлен преобразователь с
разомкнутой магнитной цепью. Он
состоит из катушки 1, внутри которой помещен стальной сердечник 2. Вследствие перемещения сердечника, изменяется индуктивность катушки, которая является
функцией измеряемой механической величины.
В преобразователе (рис. 2, в) при введении в воздушный зазор коротко замкнутого витка 1 индуктированные в витке токи создают активные потери, что эквивале- Рисунок 2
нтно введению в магнитную цепь реактивного магнитного сопротивления Хм. Введение Хм, наряду с уменьшением плошали рабочего воздушного зазора, увеличивает общее магнитное сопротивление, пропорциональное перемещению витка.
Изменяя профиль диска в преобразователе (рис. 2, г), можно получить любой вид зависимости индуктивности от угла поворота диска. Преобразователи данного типа используются для измерения угловых перемещений до 180... 360°.
 В преобразователе,
применяемом для измерения угловых nepeмещений до 90° (рис. 2, д),
магнитопровод состоит из неподвижного сердечника 2 и подвижного,
поворачиваемого, сердечника 1. Оба сердечника выполняют из шихтованной стали.
При совпадении направлений шихтовки вторичные токи в пластинах
В преобразователе,
применяемом для измерения угловых nepeмещений до 90° (рис. 2, д),
магнитопровод состоит из неподвижного сердечника 2 и подвижного,
поворачиваемого, сердечника 1. Оба сердечника выполняют из шихтованной стали.
При совпадении направлений шихтовки вторичные токи в пластинах
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.