|
Движение Уст(В5).
У этого движения настраиваем 2-а параметра L5,K5, так как это движение осуществляется вручную, скорость и направление определяются оператором.
|
|
Соответственно конечная точка, это нуль шкалы.
Движение Уст(П6).
Этим движением обеспечивается совмещение вершин конусов производящего и нарезаемого колес. Движение осуществляется в ручную, поэтому скорость и направление его определяются оператором.
|
Для
настройки пути необходимо установить бабку изделия так, чтобы торец шпинделя
отстоял от центра станка на расстоянии (рис.10): ![]() , где
, где![]() -базовое
расстояние нарезаемого колеса,
-базовое
расстояние нарезаемого колеса, ![]() -размер оправки.
-размер оправки.
![]() ,
, ![]() ( из геометрических параметров детали
рис.3)
( из геометрических параметров детали
рис.3)
Найдем А1: ![]() , угол
, угол ![]() (рис.3)
(рис.3)
![]()
![]()
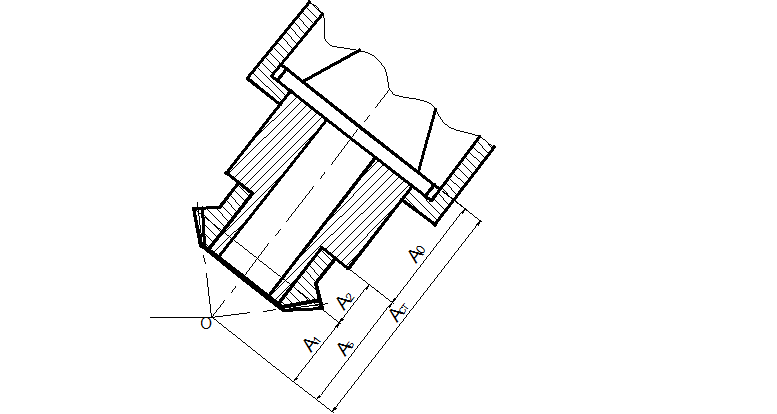
Рис.10 Схема настройки пути для движения П6.
|
Конечная точка нуль шкалы 22 (рис.1).
Движение Уст(В7).
Влияет на угол сходимости линии основания зуба нарезаемого колеса. Траектория обеспечивается поворотными направляющими. Движение простое и осуществляется в ручную, поэтому скорость и направление его определяются оператором.
|
Путь и конечная точка определяются углом (рис.11) между резцами установленными в ползушках.
Угол рассчитываем из
геометрических параметров[2]: 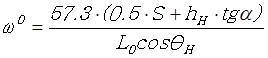
![]() -образующая
делительного конуса,
-образующая
делительного конуса,
![]() -толщина
нарезаемого колеса,
-толщина
нарезаемого колеса,
![]() -высота
ножки зуба,
-высота
ножки зуба,
![]() ,
, ![]() -угол ножки зуба.
-угол ножки зуба.
подставив, все известные значения найдем:
![]() . Найденный угол регулируем
. Найденный угол регулируем
поочередным поворотом сегментов 5 и 6.(рис.12).
Угол отсчитывают по шкалам 4 и 7.
Рис.11 Схема расположения
угла
сходимости зуба.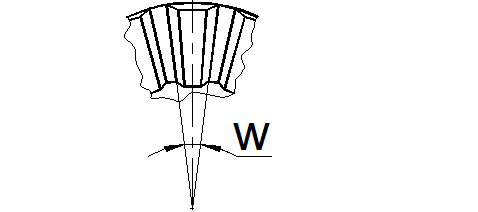
Рис.12 Конструкция люльки станка.
Движение Всп (В8).
Это движение не настраивается, а реализуется за счет конструкции следующим образом (рис.8), при возвратно – поступательном движении ползунов 11, а следовательно, и суппортов 12, планки 19, притормаживаемые колодками тормозов 20 и увлекаемые пальцами 18 рычагов 17, перемещаются также возвратно – поступательно вместе с суппортами и по отношению их на величину, ограниченную величиной хода пальца 18 в косых пазах, заставляя тем самым поворачиваться рычаги 17и 16Ю резцедержатели 14 и резцы Р1, Р2.
Движение Всп (В8).
Это движение осуществляется с помощью гидропривода станка, т.е. гидравлически, им управляет оператор. Скорость этого движения можно настраивать при помощи дросселя (изменения его сечения) установленного в гидроприводе.
5. Список литературы
1. Сильвестров Б.Н., Захаров И.Д. «Конструкция и наладка зуборезных и резьбонарезных станков».Учебник для вузов. -М: Высшая школа,1979,-255с.
2. Казанцев М.Е., Иванцивский В.В. «Настройка и наладка зубострогального станка при нарезании конических колес ». Метод. указ.к лаб. работе №3, НГТУ, 1993. –30с.
3. Сильвестров Б.Н. «Справочник молодого зуборезчика»: Учебное пособие для технических училищ -М: Высшая школа, 1981,-199с.
4. Кудрявцев В.Н. Державец Ю.А.«Курсовое проектирование деталей машин». Учебное пособие для студентов машиностроительных специальностей вузов. – Ленинград: Машиностроение, 1984: -400с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.