



49. Синтез корректирующих устройств САР по ЛЧХ. Построение желаемой ЛАЧХ в низкочастотном диапазоне.
Данный метод синтеза является структурно – параметрическим, т.к. позволяет определять структуру и параметры КУ по заданным показателям качества и характеристикам неизменяемой части САР.
Достоинство метода. Возможность упрощения корректирующего устройства по близости частотных характеристик синтезируемой и желаемой САР.
Ограничение применения метода. Следящие системы с единичной главной обратной связью.
Реализация метода включает шесть этапов.
1. Формулировка исходных данных и технических требований к САР.
2. Построение ЛАЧХ LН(ω) нескорректированной разомкнутой САР.
3. Построение желаемой ЛАЧХ Lж(ω) скорректированной САР.
4. Выбор схемы включения КУ и расчет его ЛАЧХ LКУ(ω).
5. Выбор принципиальной схемы физической реализации КУ по его LКУ(ω) и расчет параметров данной схемы.
6. Проверочный расчет САР на соответствие заданным техническим требованиям.
Исходные данные о неизменяемой части системы (усилитель, исполнительный механизм и т.п.) задаются передаточной функцией нескорректированной разомкнутой САР WН(p).
Технические требования к САР. Требования к точности (установившаяся ошибка при определенных воздействиях на САР) и показатели качества переходного процесса при единичном ступенчатом задающем воздействии.
Будем рассматривать объект управления, поведение которого описывает передаточная функция W0(p).
Требования к поведению замкнутой системы заданы в виде оценок переходного процесса, в качестве которых используются статическая ошибка δст, перерегулирование (σ%) и быстродействие tn.
Необходимо определить передаточную функцию Wk(p) корректирующего звена (регулятора), включение которого в систему обеспечит в ней заданное качество работы.
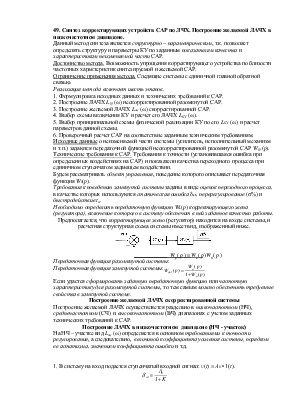
![]() Предполагается,
что корректирующее звено (регулятор) находится на входе системы, и
расчетная структурная схема системы имеет вид, изображенный ниже.
Предполагается,
что корректирующее звено (регулятор) находится на входе системы, и
расчетная структурная схема системы имеет вид, изображенный ниже. 
 Передаточная функция разомкнутой системы:
Передаточная функция разомкнутой системы:
Передаточная функция замкнутой системы:
Если удастся сформировать заданную передаточную функцию или частотную характеристику для разомкнутой системы, то тем самым можно обеспечить требуемые свойства в замкнутой системе.
Построение желаемой ЛАЧХ скорректированной системы
Построение желаемой ЛАЧХ осуществляется раздельно в низкочастотном (НЧ), среднечастотном (СЧ) и высокочастотном (ВЧ) диапазонах с учетом заданных технических требований к САР.
Построение ЛАЧХ в низкочастотном диапазоне (НЧ - участок)
На НЧ – участке вид Lж(ω) определяется в основном требованиями к точности регулирования, а следовательно, величиной коэффициента усиления системы, порядком ее астатизма, значением коэффициента ошибки и т.д.
 1. В систему на вход подается ступенчатый входной
сигнал: v(t) = А0
• 1(t).
1. В систему на вход подается ступенчатый входной
сигнал: v(t) = А0
• 1(t).
1.1. Допустима статическая ошибка: → Наклон Lж(ω) НЧ – участка нулевой.
 |
Коэффициент усиления K разомкнутой скорректированной САР:
1.2. Статическая ошибка не допустима: δст = 0:
Наклон Lж(ω) НЧ – участка равен: - 20 дБ/дек.
 Скоростная ошибка равна: δск = А1K-1, где А1
- скорость линейно – изменяющегося воздействия.
Скоростная ошибка равна: δск = А1K-1, где А1
- скорость линейно – изменяющегося воздействия.
Коэффициент усиления K разомкнутой скорректированной САР:
Уравнение НЧ – участка желаемой ЛАХ:
Lж(ω) = 20lgKскор – 20lgω.
При ω = 1 дек НЧ – участок или его продолжение имеют координату 20lgKскор.
2. В систему на вход подается гармонический входной сигнал: v(t) = Аm sin(ωt+φ).
![]() Определяется: |W( jωmax)| = Am/δm, L(ωmax) = 20lg |W( jωmax)|, где Am - амплитуда
задающего гармонического воздействия; ωmax - максимальная
частота.
Определяется: |W( jωmax)| = Am/δm, L(ωmax) = 20lg |W( jωmax)|, где Am - амплитуда
задающего гармонического воздействия; ωmax - максимальная
частота.
Граничная частота НЧ – участка должна быть , где ω1 - частота сопрягающая НЧ – участок и СЧ – участок (первая сопрягающая частота).
При синтезе следящих систем, входной сигнал которых заранее неизвестная функция времени, обычно указываются только максимально возможные значения скорости (v’) и ускорения (v’’) входного сигнала и задаются требованием к величине максимально допустимой динамической ошибке регулирования δдин.
В этом случае подбирается эквивалентное гармоническое воздействие

 v(t)
= A sin(ωkt), где
v(t)
= A sin(ωkt), где
и
 При воспроизведении следящей системой
эквивалентного гармонического воздействия ошибка регулирования также будет гармонической
с той же частотой ωk и амплитудой
vmax.
При воспроизведении следящей системой
эквивалентного гармонического воздействия ошибка регулирования также будет гармонической
с той же частотой ωk и амплитудой
vmax.
Следовательно:
 |
Полагая | Wраз( jωk) | >> 1, имеем :
 |
 |
||
Откуда
 Из последнего выражения следует, что эквивалентное
входное воздействие будет воспроизводиться следящей системой с ошибкой, не превышающей
vmax, если при ω = ωk ордината
желаемой
ЛАХ будет не менее
Из последнего выражения следует, что эквивалентное
входное воздействие будет воспроизводиться следящей системой с ошибкой, не превышающей
vmax, если при ω = ωk ордината
желаемой
ЛАХ будет не менее
 Точку
К с координатами (ωk ;L(ωk ))
называют контрольной точкой.
Точку
К с координатами (ωk ;L(ωk ))
называют контрольной точкой.
На этом рисунке указаны две прямые, пересекающиеся в точке К, имеющие наклон
• - 20 дБ/дек при ω < ωk ;
• - 40 дБ/дек при ω > ωk .
Уравнения этих прямых получены
 на основании выражения:
на основании выражения:
при уменьшении скорости и ускорения
входного сигнала по отношению
к их максимально возможным значениям.
Данные прямые представляют собой границы
запретной зоны для желаемой ЛАХ
следящей системы с астатизмом первого порядка.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.