1. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ
1.1 Исходные данные
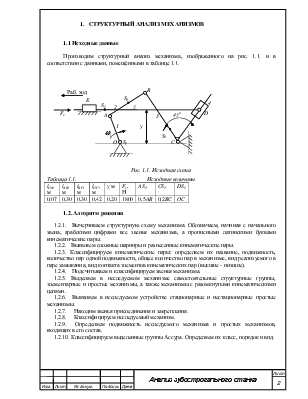
Производим структурный анализ механизма, изображенного на рис. 1.1. и в соответствии с данными, помещёнными в таблице 1.1.
Рис. 1.1. Исходная схема
Таблица 1.1. Исходные величины
|
lOA, м |
lAB, м |
lBC, м |
lOC, м |
y, м |
Fc, Н |
AS2 |
CS3 |
DS5 |
|
0,07 |
0,30 |
0,30 |
0,42 |
0,20 |
1800 |
0,5AB |
0,2BC |
OC |
1.2. Алгоритм решения
1.2.1. Вычерчиваем структурную схему механизма. Обозначаем, начиная с начального звена, арабскими цифрами все звенья механизма, а прописными латинскими буквами кинематические пары.
1.2.2. Выявляем сложные шарниры и разнесенные кинематические пары.
1.2.3. Классифицируем кинематические пары: определяем их название, подвижность, количество пар одной подвижности, общее количество пар в механизме, вид реализуемого в паре замыкания, вид контакта элементов кинематических пар (высшие - низшие).
1.2.4. Подсчитываем и классифицируем звенья механизма.
1.2.5. Выделяем в исследуемом механизме самостоятельные структурные группы, элементарные и простые механизмы, а также механизмы с разомкнутыми кинематическими цепями.
1.2.6. Выявляем в исследуемом устройстве стационарные и нестационарные простые механизмы.
1.2.7. Находим звенья присоединения и закрепления.
1.2.8. Классифицируем исследуемый механизм.
1.2.9. Определяем подвижность исследуемого механизма и простых механизмов, входящих в его состав.
1.2.10. Классифицируем выделенные группы Ассура. Определяем их класс, порядок и вид.
1.3. Решение
Структурный анализ зубострогального станка для нарезания конических колес проводим в соответствии с написанным ранее алгоритмом.
1.3.1. Структурная схема механизма приведена на рис. 1.2.
Рис.1.2. Структурная схема механизма
1.3.2. В данном механизме сложных и разнесенных кинематических пар нет.
1.3.3. Классификация кинематических пар механизма приведена в таблице 1.2.
Таблица 1.2. Классификация кинематических пар
|
№ п/п |
Номер звеньев, образующих пару |
Условное обозначение |
название |
подвижность |
Высшая – низшая КП |
Замыкание Геометрич. - силовое |
Открытая - закрытая |
|
1 |
0-1 |
|
вращательная |
1 |
Н |
геометрическое |
З |
|
2 |
1-2 |
|
вращательная |
1 |
Н |
геометрическое |
З |
|
3 |
2-3 |
|
вращательная |
1 |
Н |
геометрическое |
З |
|
4 |
3-0 |
|
качательная |
1 |
Н |
геометрическое |
З |
|
5 |
4-3 |
|
поступательная |
1 |
Н |
геометрическое |
З |
|
6 |
4-5 |
|
вращательная |
1 |
Н |
геометрическое |
З |
|
7 |
0-5 |
|
поступательная |
1 |
Н |
геометрическое |
З |
В данном механизме одноподвижных кинематических пар P1=7 и кинематических пар всего P=7.
1.3.4. Проводим классификацию звеньев механизма. Она показана в таблице 1.3.
Таблица 1.3. Классификация звеньев механизма
|
№ п/п |
Номер звена |
Условное обозначение |
название |
движение |
Число вершин |
|
1 |
0 |
|
стойка (0) |
отсутствует |
- |
|
2 |
1 |
|
кривошип (1) |
вращательное |
2 |
|
3 |
2 |
|
шатун (2) |
сложное |
2 |
|
4 |
3 |
|
кулиса (3) |
вращательное |
3 |
|
5 |
4 |
|
кулиса – камень (4) |
сложное |
2 |
|
6 |
5 |
|
ползун (5) |
поступательное |
2 |
Механизм имеет четыре двухвершинных линейных звена – звенья 1, 2, 4 и 5 и одно трехвершинное – звено 3. Поэтому n=5.
1.3.5. Выделяем в данном структурном механизме самостоятельные структурные группы. Они приведены на рис. 1.3. На рис. 1.3.а) показан простейший механизм, а на рис. б) – диады – структурные группы.
![]()
Рис.1.3. Простые механизмы и структурные группы
Докажем, что подвижность диад равна 0. Для этого воспользуемся формулой Чебышева (1.1).
![]() , (1.1)
, (1.1)
где n – общее количество звеньев в механизме (структурной группе), P1 – общее число одноподвижных кинематических пар, P2 – количество двухподвижных кинематических пар.
Для диады, изображенной на рис. б) первой, получим:
![]()
Для диады,
изображенной второй, аналогично получим ![]() .
.
1.3.6. Зубострогальный станок имеет в своем составе лишь простые стационарные механизмы.
1.3.7. В данном случае звеньев закрепления нет. Есть звено присоединения – это кулиса, которая входит в диаду, изображенную на рис. 1.3. б).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.