Вторым этапом работы является синтез САУ, то есть определение структуры и параметров системы по заданным показателям качества. Эта задача решается тремя способами. Первый способ – введение в исходную структуру последовательного корректирующего устройства. Второй способ – введение в исходную структуру параллельного корректирующего устройства. Третий способ – структурно-параметрический синтез САУ, в результате которого необходимо получить систему подчиненного регулирования электропривода. Заключительным этапом синтеза является определение схемных реализаций последовательного и параллельного корректирующих устройств, регуляторов и фильтров.
В заключении работы необходимо провести анализ скорректированной САУ. Для этого строются переходные характеристики всех трёх скорректированных систем при единичном ступенчатом воздействии, исходя из которых делается вывод о соответствии показателей качества получившихся структур заданным.
Преобразуем систему к одноконтурному виду:
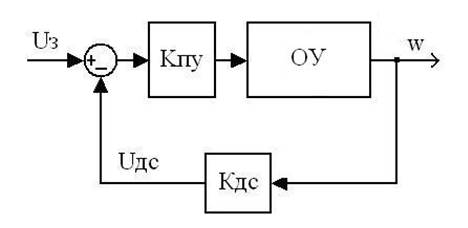
Рисунок 1.1 – Одноконтурная САУ
Введём следующие обозначения:
 (1.1)
(1.1)
 (1.2)
(1.2)
Передаточная функция W2 представляет собой передаточную функцию объекта управления, которая состоит из произведения передаточной функции тиристорного преобразователя и передаточной функции двигателя.
То
есть ![]()
Передаточная функция в разомкнутом состоянии запишется по управляющему воздействию:
![]()
Подставляя значения передаточных функции W1 и W2 в формулу (1.1), получим выражение передаточной функции в разомкнутом состоянии:
 (1.3)
(1.3)
Преобразуем исходную структурную схему к следующему виду:
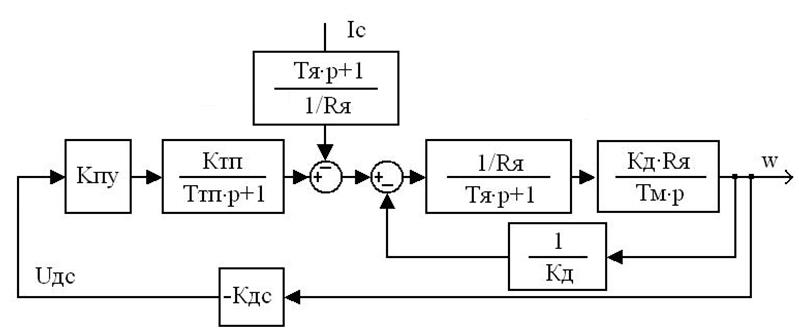
Рисунок 1.2 – Преобразованная структурная схема
для нахождения передаточных функций по возмущению
Передаточная функция разомкнутой системы по возмущающему воздействию:
 (1.4)
(1.4)
Из условия статической точности (δ = 2%) и заданного диапазона регулирования (D = ωmax/ωmin= 60) определим требуемый коэффициент усиления разомкнутой системы:
Необходимый коэффициент усиления разомкнутой системы определяется по формуле:
 (2.1)
(2.1)
Относительная просадка скорости определяется:
 (2.2)
(2.2)
![]() (2.3)
(2.3)
![]() (2.4)
(2.4)
Подставив значения в формулу (2.1), получим значение необходимого коэффициента усиления разомкнутой САУ:
Определение коэффициента передачи промежуточного усилителя:
 (2.5)
(2.5)

Определение передаточной функции по управляющему воздействию:
 (1.5)
(1.5)
Определение передаточной функции по возмущающему воздействию:
(1.6)
Определение передаточной функции по ошибке по управляющему воздействию:
 (1.7)
(1.7)
Выразим передаточную функцию по ошибке от возмущающего воздействия:
Запишем все полученные передаточные функции подставив найденное значение Кпу:
1) Передаточная функция по управляющему воздействию в разомкнутом состоянии:

2) Передаточная функция по возмущающему воздействию в разомкнутом состоянии:

3) Передаточная функция по управляющему воздействию в замкнутом состоянии:
![]()

4) Передаточная функция по возмущающему воздействию в замкнутом состоянии:

5) Передаточная функция по ошибке от управляющего воздействия:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.